
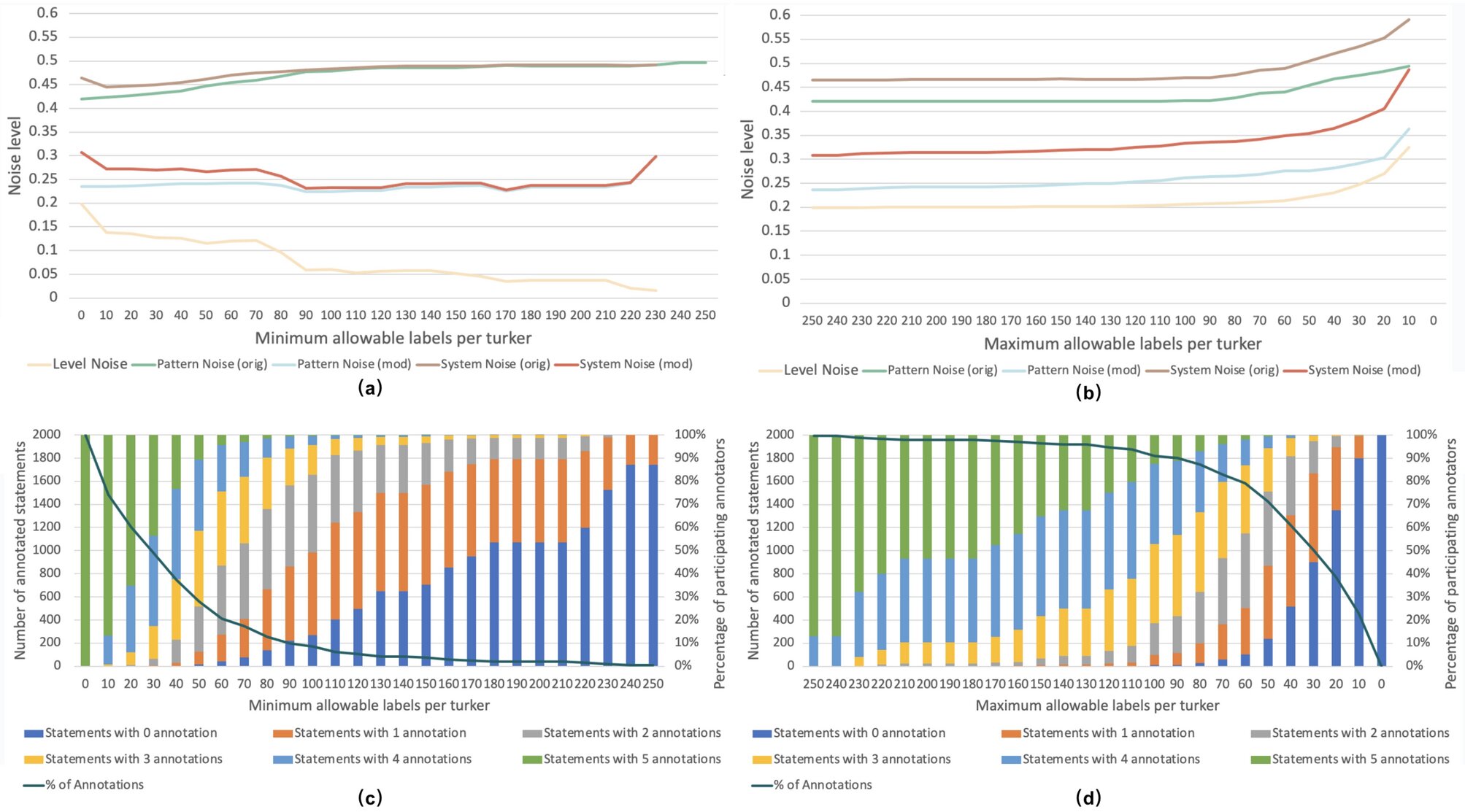
人类判断力的差异给人工智能带来了问题
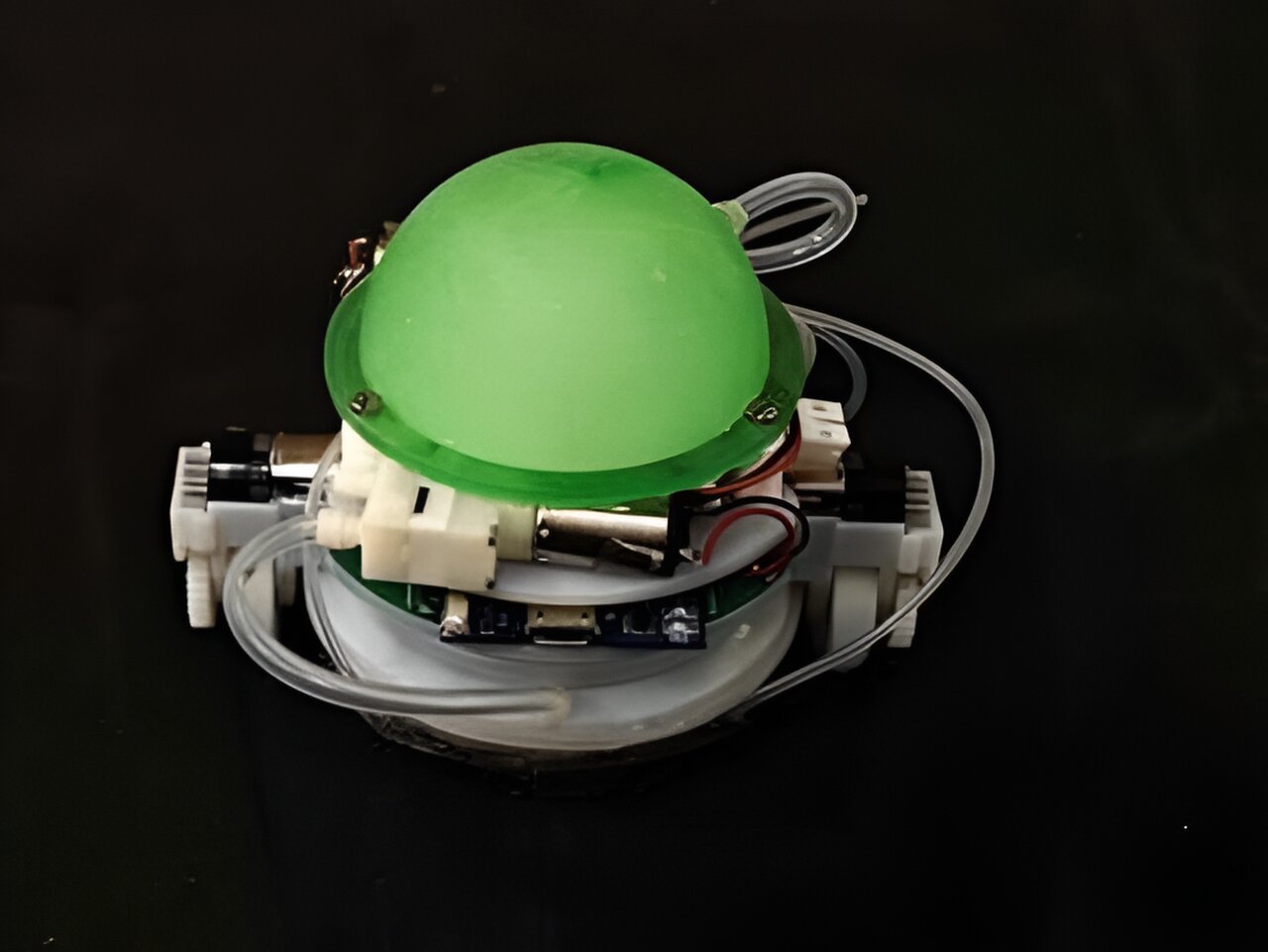
受动物大脑启发的自主机器人人工智能游戏规则改变者

“神经形态无人机”飞过花朵图案的照片。 它说明了无人机从角落里的神经形态相机接收到的视觉输入。 红色表示像素变暗,绿色表示像素变亮。 图片来源:Guido de Croon 代尔夫特理工大学的一组研究人员开发了一种无人机,可以利用基于动物大脑工作原理的神经形态图像处理和控制来自主飞行。 与当前在图形处理单元 (GPU) 上运行的深度神经网络相比,动物大脑使用的数据和能量更少。 因此,神经形态处理器非常适合小型无人机,因为它们不需要笨重且大型的硬件和电池。 结果非常出色:在飞行过程中,无人机的深度神经网络处理数据的速度比在 GPU 上运行时快 64 倍,消耗的能源少三倍。 这项技术的进一步发展可能会让无人机飞跃变得像飞虫或鸟类一样小型、敏捷和智能。 研究结果是 发表 在日记中 科学机器人。 向动物大脑学习:尖峰神经网络 人工智能在为自主机器人提供现实应用所需的智能方面具有巨大潜力。 然而,当前的人工智能依赖于需要大量计算能力的深度神经网络。 用于运行深度神经网络的 GPU 会消耗大量能源。 对于无人机等小型机器人来说,这尤其是一个问题,因为它们在传感和计算方面只能携带非常有限的资源。 动物大脑处理信息的方式与 GPU 上运行的神经网络非常不同。 生物神经元异步处理信息,并且主要通过称为尖峰的电脉冲进行通信。 由于发送此类尖峰会消耗能量,因此大脑会最大限度地减少尖峰,从而导致稀疏处理。 受到动物大脑这些特性的启发,科学家和科技公司正在开发新的神经形态处理器。 这些新处理器使它们能够运行尖峰神经网络,并有望更快、更节能。 “尖峰神经网络执行的计算比标准深度神经网络中的计算简单得多,”Jesse Hagenaars 博士说。 候选人和文章的作者之一,“数字尖峰神经元只需要添加整数,而标准神经元必须乘以和添加浮点数。这使得尖峰神经网络更快、更节能。要理解原因,想想如何人类还发现计算 5 + 8 比计算 6.25 x 3.45 + 4.05 x 3.45 容易得多。” 如果神经形态处理器与神经形态传感器(如神经形态相机)结合使用,这种能源效率会进一步提高。 此类相机不会以固定的时间间隔拍摄图像。 相反,每个像素仅在变亮或变暗时发送信号。 此类相机的优点是它们可以更快地感知运动,更加节能,并且在黑暗和明亮环境中都能正常工作。 […]
电影工具可以显着改善虚拟现实环境中的用户体验
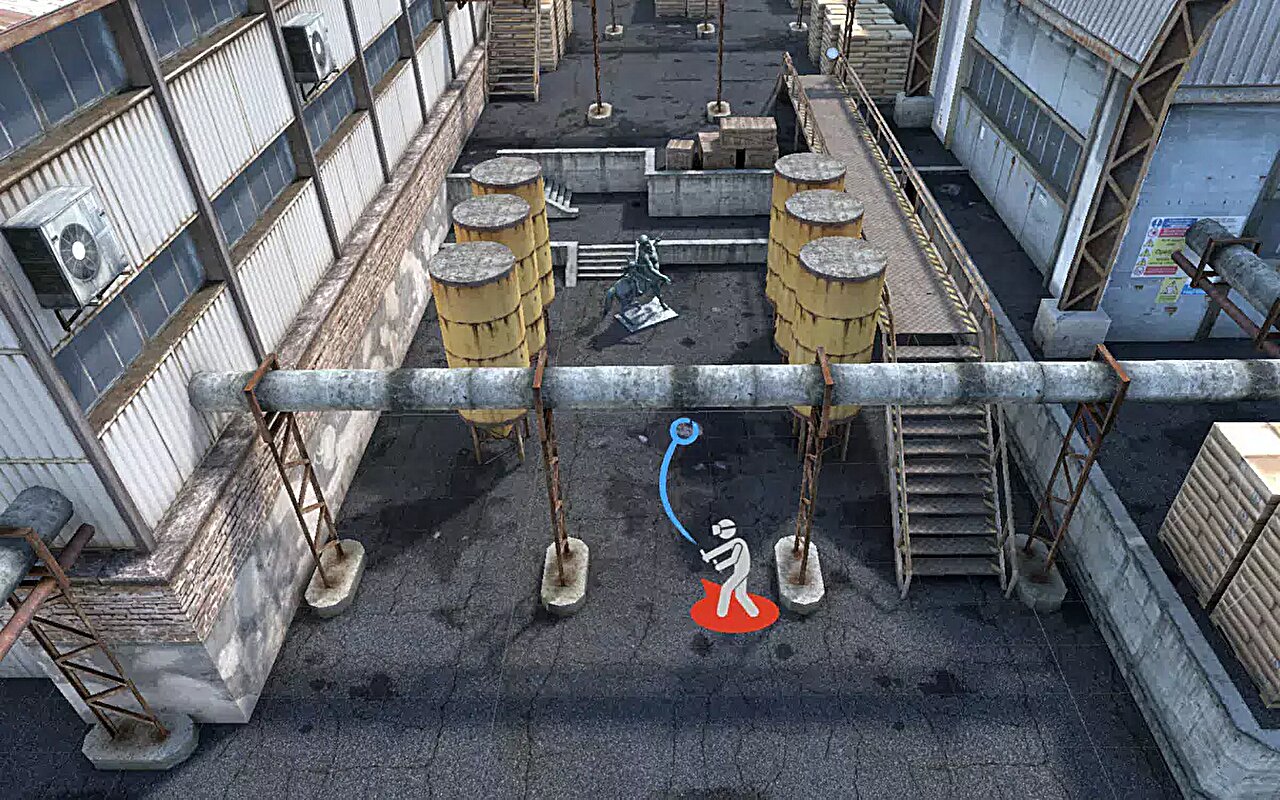
如果没有远程传送,许多用户将因晕动病而无法使用虚拟现实。 不幸的是,远程传送可能会导致用户错过周围环境的重要方面。 图片来源:艾伦·梅德拉 电影摄影技术可以显着提高用户对虚拟环境的参与度,特别是用户在虚拟现实中看到的审美吸引力。 这是赫尔辛基大学计算机科学家最近进行的一项研究的结果。 结果是 发表 五月份在 CHI 计算系统中的人为因素会议论文集。 该团队旨在研究如何利用电影制作中常用的构图和连续性原则来增强虚拟环境中的导航。 构图是指场景中的元素如何相对于观看者定向,而连续性是指镜头之间的摄像机位置如何帮助观看者理解场景中元素之间的空间关系。 赫尔辛基大学计算机科学研究员艾伦·梅德拉 (Alan Medlar) 表示:“利用这些想法,我们开发了一种新的隐形传送方法来探索虚拟环境,在隐形传送后巧妙地重新定位和重新定向用户的视角,以更好地构建场景内容。” 下图显示了这与现代 VR 游戏中使用的常规隐形传送有何不同:从相同的起点(顶部图像),常规隐形传送使用户向前移动,同时保持相同的方向(中间图像),而电影技术可以增加视觉吸引力环境(下图)。 电影技术如何在虚拟现实中使用的两个例子。 每列显示起始位置(顶部)、传送后(中)以及应用电影摄影技术重新构建场景后(底部)。 图片来源:艾伦·梅德拉 保留空间感而不会晕车 研究结果还解决了晕动症的问题——这是 VR 用户的一个常见问题。 通常,为了防止恶心,设计者使用隐形传态作为在数字空间中移动的方法。 研究人员的方法也是基于隐形传态,但其目的是解决与该技术相关的问题。 “在虚拟环境中,远程传送可能会导致空间意识下降,迫使用户在远程传送后重新定位自己,并可能导致他们错过周围环境中的重要元素,”梅德拉说。 “我们使用的电影摄影技术为虚拟环境的设计者提供了一种影响用户在空间中移动时的注意力的方法,从而影响他们对周围环境的感知。” 这项研究对一系列 VR 应用具有重大意义,特别是随着 VR 头显的价格不断提高。 视频游戏、虚拟博物馆、画廊和 VR 电影都可以从这些发现中受益,利用所提出的方法为用户打造更具吸引力和连贯性的体验。 Medlar 相信研究结果将对虚拟现实设计师有实际用途。 “改进 VR 导航并为设计师提供更多影响用户体验的工具的潜在影响是巨大的。” 更多信息: Alan Medlar 等人,《幕后花絮:调整摄影和编辑概念以适应虚拟现实中的导航》 CHI 计算系统中的人为因素会议论文集 (2024)。 DOI:10.1145/3613904.3642412 由赫尔辛基大学提供 引文:电影工具可以显着改善虚拟现实环境中的用户体验(2024 年,5 月 […]
受蜗牛启发的新型机器人可以爬墙
Credit: Tianqi Yue 布里斯托大学的研究人员开发了一种旨在模仿蜗牛运动的机器人。 除了日益创新的机器人导航新方式外,布里斯托尔机器人实验室的团队还为机器人安装了滑动吸力机构,使设备能够在水上滑动,这是蜗牛粘液的替代品,蜗牛粘液也可用作粘合剂。 该研究是 发表 5月13日于 自然通讯,展示了机器人轻松攀爬墙壁的一种新颖方法,有可能改变难以接近的表面(例如风力涡轮机叶片、船体、飞机和摩天大楼玻璃窗)的自动检查方式。 这些特性也赋予滑动吸力未来在机器人领域的应用潜力,包括工业抓取、攀爬、户外和运输。 蜗牛只需一个高有效负载吸盘即可在表面上稳定滑动,为下一代攀爬机器人提供高效的粘附运动机制。 蜗牛滑动吸力行为的关键因素是粘液分泌,它可以减少摩擦并增强吸力。 倒挂。 图片来源:布里斯托大学 主要作者Tianqi Yue解释说:“人们知道蜗牛具有稳定的粘性滑动行为,即使它们携带着很重的有效载荷,在这种情况下是一个贝壳。 “受此启发,我们提出了‘滑动吸力’机构,开发了滑动吸力机器人,实现了与蜗牛媲美的滑动能力。” 由于粘液在滑动吸力机构中发挥着重要作用,因此团队使用水作为廉价、易于获取且清洁的人造粘液来帮助机器人滑动,同时保持吸力。 他们优化了吸盘的材料,设计了机器人的机电系统,并能够演示机器人的实际应用,例如承载200g质量和避障。 该机器人还展示了高负载滑动能力,可承载 1 公斤质量,比自身重 10 倍。 在墙上。 图片来源:布里斯托大学 滑动吸力使轻型机器人能够垂直和倒置滑动,实现高速,并且在静态粘附过程中不需要能量。 天奇补充道:“通过滑吸机器人的性能,我们证明了滑吸机器人能耗低、粘附效率高、安全性高、承载能力高、复杂性低,同时只留下快速蒸发的水迹。 “我们研究中最令人兴奋的发现是,所提出的滑动抽吸机构是一种新颖的清洁攀爬策略,将显着推进下一代攀爬机器人的开发。” 更多信息: Tianqi Yue等人,受蜗牛启发的水增强软滑动吸力,用于攀爬机器人, 自然通讯 (2024)。 DOI:10.1038/s41467-024-48293-2 由布里斯托大学提供 引文:新型蜗牛机器人可以爬墙(2024 年,5 月 14 日),2024 年 5 月 15 日检索自 本文件受版权保护。 除出于私人学习或研究目的的公平交易外,未经书面许可不得复制任何部分。 内容仅供参考。 1715754239 #受蜗牛启发的新型机器人可以爬墙 2024-05-14 14:36:21
索尼任命两名高管领导 PlayStation

图片来源:Pixabay/CC0 公共领域 索尼周一表示,两名资深高管将接替 3 月份退休的吉姆·瑞安 (Jim Ryan),担任其强大游戏部门的首席执行官。 一份声明称,Hermen Hulst 和 Hideaki Nishino 将向索尼互动娱乐 (SIE) 集团董事长 Hiroki Totoki 汇报工作,后者一直担任临时首席执行官。 行业观察家指出,拆分索尼部门的领导层并不常见。 赫尔斯特将担任新命名的工作室业务集团的首席执行官,该集团包括 PlayStation 的开发商,并负责将 PlayStation 品牌扩展到电视和电影领域。 西野将领导平台业务集团,其中包括控制台硬件、技术和配件。 他还将负责与主要出版商和独立工作室的关系。 Ryan 于 1994 年加入 SIE,并在 2019 年开始领导该部门之前担任过多个高级职位,并因使 PlayStation 5 成为迄今为止最成功的游戏机而受到赞誉。 PlayStation 5 于 2020 年推出后,其生产最初受到冠状病毒大流行导致的全球半导体短缺的打击。 随后 PlayStation 迅速占据一席之地,但随着科技行业遭遇裁员潮,该公司在 2 月份宣布了一轮裁员。 PlayStation 5 还面临着来自任天堂 Switch 的激烈竞争,在科技巨头微软收购了《使命召唤》制造商动视暴雪之后,它可能会与微软的 Xbox 展开更激烈的竞争。 在索尼阻止微软大规模收购动视暴雪的斗争中,瑞安处于最前沿,但失败了。 瑞安领导下的索尼斥巨资收购游戏工作室。 […]
原型浏览器扩展在 YouTube 上添加了类似维基百科的引用,以遏制错误信息

机器人系统为行动能力严重受限的人们提供食物

康奈尔大学研究人员开发的机器人系统在实验室演示期间为学生参与者提供食物。 图片来源:康奈尔大学 康奈尔大学的研究人员开发了一种机器人喂养系统,该系统使用计算机视觉、机器学习和多模态传感来安全地为行动能力严重受限的人提供食物,包括脊髓损伤、脑瘫和多发性硬化症患者。 康奈尔大学安·S·鲍尔斯学院计算机科学助理教授 Tapomayukh“Tapo”Bhattacharjee 表示:“用机器人给行动能力严重受限的人喂食很困难,因为许多人无法向前倾斜,需要将食物直接放入嘴里。”计算和信息科学博士以及系统背后的高级开发人员。 “当为患有其他复杂疾病的人提供食物时,挑战会加剧。” A 纸 3 月 11 日至 14 日在科罗拉多州博尔德举行的人类机器人交互会议上发表了关于该系统的题为“感觉咬合:使用稳健的口腔感知和物理交互感知控制的机器人辅助口内咬合转移”。 它获得了最佳论文荣誉奖,而研究团队更广泛的机器人喂食系统的演示则获得了最佳演示奖。 作为辅助机器人领域的领导者,Bhattacharjee 和他的 EmPRISE 实验室花了数年时间向机器传授人类进食的复杂过程。 教机器是一项复杂的挑战——从识别盘子上的食物、拿起它们,然后将其转移到护理对象的嘴里。 “从器具到口腔内部的最后 5 厘米非常具有挑战性,”Bhattacharjee 说。 Bhattacharjee 说,一些护理接受者的张口可能非常有限,小于 2 厘米,而另一些人则可能会意外地出现不自主的肌肉痉挛,即使器具在嘴里也是如此。 此外,有些人只能在口腔内的特定位置咬食物,他们通过用舌头推动器具来表示这一点,他说。 该论文的主要作者、该领域的博士生拉贾特·库马尔·杰纳马尼 (Rajat Kumar Jenamani) 表示:“当前的技术只能观察一个人的面部一次,并假设他们会保持静止,但事实往往并非如此,而且对护理接受者来说可能会受到很大限制。”计算机科学。 为了应对这些挑战,研究人员开发并为他们的机器人配备了两个基本功能:根据用户动作进行调整的实时嘴巴跟踪,以及使机器人能够在发生物理交互时检测其本质并做出反应的动态响应机制适当地。 研究人员表示,这使得系统能够区分突然痉挛、故意咬伤和用户试图操纵口腔内的器具。 在一项跨越三个地点的用户研究中,该机器人系统成功地为 13 名患有不同健康状况的人提供了食物:康奈尔大学伊萨卡校区的 EmPRISE 实验室、纽约市的一个医疗中心和康涅狄格州的一个护理接受者的家中。 研究人员表示,该机器人的用户发现它既安全又舒适。 巴塔查尔吉说:“这是对最终用户的任何自主机器人辅助喂养系统最广泛的现实评估之一。” 该团队的机器人是一个多关节手臂,末端有一个定制的器具,可以感知施加在其上的力。 嘴部跟踪方法通过数千张具有不同参与者头部姿势和面部表情的图像进行训练,结合了位于器具上方和下方的两个摄像头的数据。 研究人员表示,这样可以精确检测口腔,并克服器具本身造成的任何视觉障碍。 Jenamani 说,这种物理交互感知响应机制使用视觉和力感应来感知用户如何与机器人交互。 “我们正在让个人能够仅用舌头控制 20 磅重的机器人,”他说。 他认为用户研究是该项目最令人满意的方面,并指出机器人对护理接受者及其护理人员的重大情感影响。 在一次治疗期间,一名患有脑裂畸形(一种罕见的先天缺陷)女儿的父母亲眼目睹了她使用该系统成功地进食。 “这是一个真正激动人心的时刻;她的父亲举起帽子庆祝,而她的母亲几乎流下了眼泪,”杰纳玛尼说。 […]
波音公司的问题也令美国航空监管机构感到不安

阿拉斯加航空的这架波音 737 MAX 9 飞机在 2024 年 1 月 5 日的飞行中丢失了侧板。 美国联邦航空管理局在2018年和2019年发生两架波音飞机坠毁事件后受到严厉批评,再次被拖入围绕美国主要航空航天制造商的漩涡中。 1 月 5 日,阿拉斯加航空公司一架飞机的机身面板在飞行途中发生戏剧性爆炸,导致波音公司一系列高级官员离职,其中包括将于年底辞职的首席执行官戴夫·卡尔霍恩 (Dave Calhoun),并导致该机的产量减少。最大 737 但随着波音在美国和国外面临多次质询和审计,该公司一再向批评者保证,该公司正在“完全透明地并在美国联邦航空局监管机构的监督下”开展工作。 自 2019 年 8 月以来,美国联邦航空局 (FAA) 已经经历了四位老板的更替,它也无法逃避一部分责任。 “美国联邦航空局也必须承担责任,”负责调查波音公司安全实践的小组委员会主席、参议员理查德·布卢门撒尔 (Richard Blumenthal) 表示。 一月份面板事件发生后,该机构派出一个团队检查波音工厂,并给该公司 90 天的时间提供“行动计划”来解决几个问题领域。 自我报告 航空顾问兼前局长杰夫·古泽蒂 (Jeff Guzzetti) 表示,“我认为,自 2018 年和 2019 年印度尼西亚和埃塞俄比亚发生导致 346 人死亡的坠机事件以来,美国联邦航空管理局 (FAA) 正在尽其所能,并且大大改善了对波音公司的监控”该机构的调查部门。 2024 年 4 月 17 日,举报人在向调查波音安全做法的美国参议院委员会作证之前宣誓。 “但他们确实未能发现生产问题,”他说,并指出几十年来美国联邦航空局一直依赖制造商自己“自我报告问题”。 由于缺乏资金和人员,美国联邦航空局长期以来一直将质量保证工作委托给飞机制造商预先批准的员工。 […]
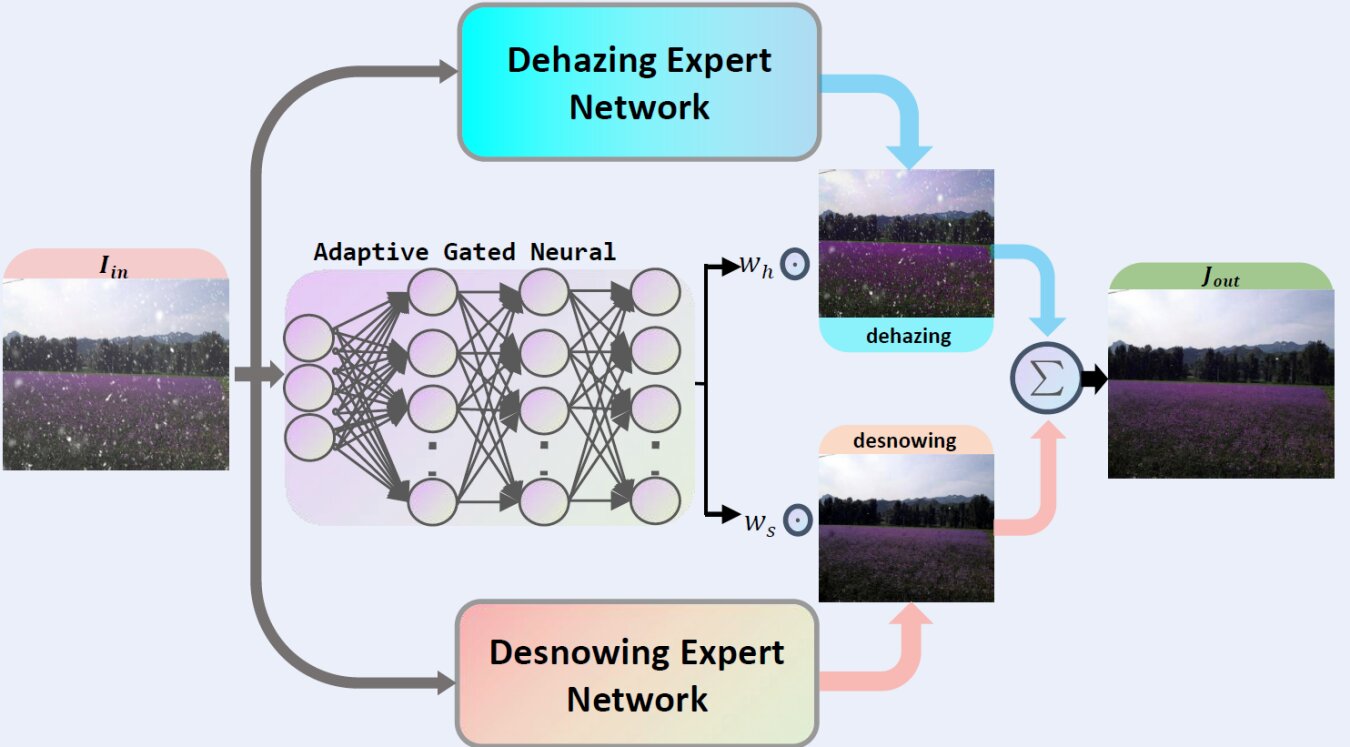
用于联合单幅图像去雾去雪的降级自适应神经网络
控制变形软机器人的更好方法
