
开发用于自动采摘苹果的新型机器人夹持器

图片来源:华盛顿州立大学 华盛顿州立大学研究人员开发的机器人夹持器能够轻轻地从树上摘下大多数苹果,而不会损坏果实。 这款创新的夹持器是机器人装置的一部分,研究人员希望有一天它能为华盛顿农民完成水果采摘和其他农活,以帮助缓解持续的劳动力短缺问题。研究人员最近 发布 他们在夹钳方面的工作发表在 IEEE 第七届软机器人国际会议。 “我们希望这个项目能帮助很多人,”华盛顿州立大学机械与材料工程学院的博士生、论文第一作者克里斯·尼纳坦塔 (Chris Ninatanta) 说道。“华盛顿的劳动力短缺对果园来说非常不利。” 该夹钳重约三分之二磅,使用三根电缆来移动 3D 打印的硬塑料和硅橡胶头手指。手指必须足够柔和,不会损坏苹果,但又要足够有力,才能将苹果从树上拔下来。该夹钳的生产成本约为 30 美元,包括一个用于抓取和松开苹果的开关。它能够成功抓取果园中超过 87.5% 的苹果,而不会损坏它们。 机械与材料工程学院弗莱厄蒂助理教授 Ming Luo 表示:“我们一直致力于通过新设计提高这一水平。”Luo 和生物系统工程学教授兼华盛顿州立大学精准与自动化农业系统中心主任 Manoj Kakee 领导了这项工作。 华盛顿州的苹果产量居全美首位,2022 年,该行业为美国国内生产总值贡献了超过 20 亿美元。在整个华盛顿州,农场每年雇用十几到数百名工人进行果园作业,包括授粉、修剪、疏花和采摘果实。然而,随着人口老龄化和流动农场工人的减少,农民在收获季节很难满足对工人的需求。 近年来,研究人员已经开始开发机器人苹果采摘系统,但已开发的系统在果园中使用成本高昂且复杂。 尼纳坦塔在华盛顿州雅基马长大,童年时曾与父母一起摘水果。当他开始与罗合作开发苹果夹钳机器人时,他让父母录下他们的工作过程,这样他就可以模仿父母的手工来制作夹钳。 “所以这其中的一些设计实际上是受到我父母的启发,”他说。 华盛顿州立大学团队接下来将把他们的轻型夹持器连接到他们正在开发的低成本机器人系统上。与汽车经销商户外广告中经常使用的充气管人类似,机器人手臂由充满空气的柔软织物制成,与汽车经销商的版本类似,但更硬。 作为该项目的一部分,研究人员还在努力为系统添加一个机载摄像头,以便精确引导手臂,以及一个可以扭转的夹钳,类似于人手的旋转,以减少对苹果茎的损伤。他们希望在今年晚些时候在实验室和农田中试用该系统。 更多信息: Chris Ninatanta 等人,轻型软电动苹果采摘夹的设计与评估, 2024 IEEE 第七届软机器人国际会议(RoboSoft) (2024)。 DOI:10.1109/RoboSoft60065.2024.10521995 由华盛顿州立大学提供 引用:开发用于自动采摘苹果的新型机器人夹持器(2024 年 6 月 13 日)于 2024 年 6 月 […]
新算法仅通过观看视频就能发现语言
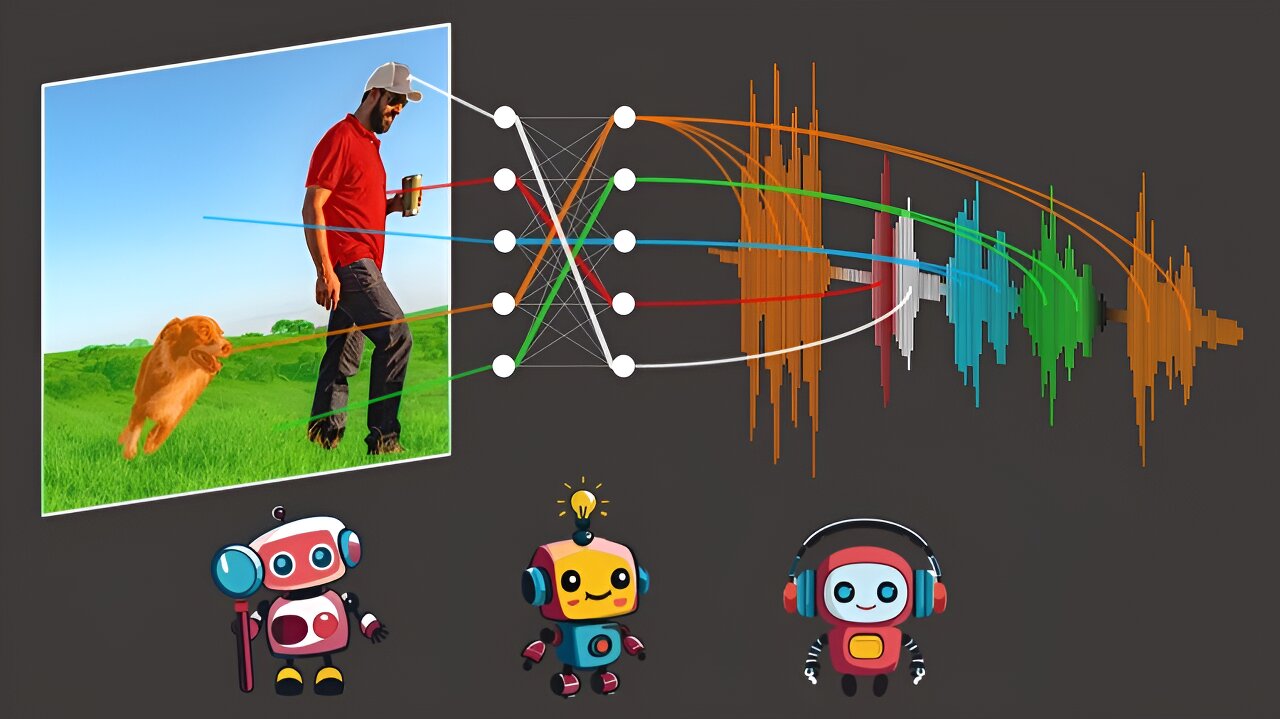
DenseAV 算法仅通过关联音频和视频信号来学习语言的含义。图片来源:Mark Hamilton 麻省理工学院电气工程和计算机科学博士生、麻省理工学院计算机科学和人工智能实验室 (CSAIL) 成员马克·汉密尔顿 (Mark Hamilton) 希望利用机器来了解动物的交流方式。为此,他首先着手创建一个可以“从零开始”学习人类语言的系统。 “有趣的是,灵感的关键时刻来自电影《帝企鹅日记》。电影中有一个场景,一只企鹅在穿越冰面时摔倒了,站起来时发出一声痛苦的呻吟。当你观看它时,几乎可以肯定,这声呻吟代表了一个四个字母的单词。正是在那一刻,我们想到,也许我们需要使用音频和视频来学习语言。”汉密尔顿说。“有没有办法让算法整天看电视,然后从中弄清楚我们在说什么?” “我们的模型 DenseAV 旨在通过根据听到的内容预测看到的内容来学习语言,反之亦然。例如,如果你听到有人说‘在 350 度下烤蛋糕’,那么你很可能看到的是蛋糕或烤箱。要想在数百万个视频的音频视频匹配游戏中取得成功,模型必须了解人们在谈论什么,”汉密尔顿说。 A 描述工作的论文 出现在 论文集 预印本服务器。 在他们训练 DenseAV 玩这个匹配游戏后,汉密尔顿和他的同事们开始观察模型在听到声音时寻找哪些像素。例如,当有人说“狗”时,算法会立即开始在视频流中寻找狗。通过查看算法选择了哪些像素,人们可以发现算法认为单词是什么意思。 有趣的是,当 DenseAV 听到狗叫时也会发生类似的搜索过程:它在视频流中搜索狗。 “这激起了我们的兴趣。我们想看看算法是否知道‘狗’这个词和狗叫声之间的区别,”汉密尔顿说。该团队通过给 DenseAV 一个“双面大脑”来探索这一点。有趣的是,他们发现 DenseAV 的大脑一侧自然专注于语言,比如“狗”这个词,另一侧专注于吠叫之类的声音。这表明 DenseAV 不仅学会了单词的含义和声音的位置,还学会了区分这些类型的跨模态连接,所有这些都不需要人工干预或任何书面语言知识。 其中一个应用分支就是从每天发布到互联网的大量视频中进行学习。 汉密尔顿说:“我们希望系统能够从大量视频内容(例如教学视频)中学习。另一个令人兴奋的应用是理解新的语言,例如海豚或鲸鱼的交流,这些语言没有书面交流形式。我们希望 DenseAV 可以帮助我们理解这些从一开始就逃避人类翻译努力的语言。最后,我们希望这种方法可以用来发现其他信号对之间的模式,例如地球发出的地震声和它的地质。” 图片来源:麻省理工学院 团队面临着一项艰巨的挑战:在没有任何文本输入的情况下学习语言。他们的目标是从一张白纸上重新发现语言的含义,避免使用预先训练的语言模型。这种方法的灵感来自于儿童通过观察和聆听周围环境来理解语言的方式。 为了实现这一壮举,DenseAV 使用两个主要组件分别处理音频和视觉数据。这种分离使算法无法作弊,因为视觉部分负责处理音频,反之亦然。它迫使算法识别物体,并为音频和视觉信号创建详细而有意义的特征。DenseAV 通过比较音频和视觉信号对来学习,以找出哪些信号匹配,哪些信号不匹配。这种方法称为对比学习,不需要标记示例,并允许 DenseAV 找出语言本身的重要预测模式。 DenseAV 与之前的算法之间的一个主要区别是,之前的研究只关注声音和图像之间的相似性这一单一概念。整个音频片段(例如某人说“狗坐在草地上”)与整张狗的图像相匹配。这使得之前的方法无法发现细粒度的细节,例如单词“草”与狗下面的草之间的联系。 该团队的算法会搜索并汇总音频片段和图像像素之间所有可能的匹配。这不仅提高了性能,还使该团队能够以以前的算法无法做到的方式精确定位声音。 “传统方法使用单一类别标记,但我们的方法会比较声音的每个像素和每一秒。这种细粒度的方法让 DenseAV 能够建立更详细的连接,从而实现更好的定位,”汉密尔顿说。 研究人员在 AudioSet 上训练了 DenseAV,其中包含 200 […]
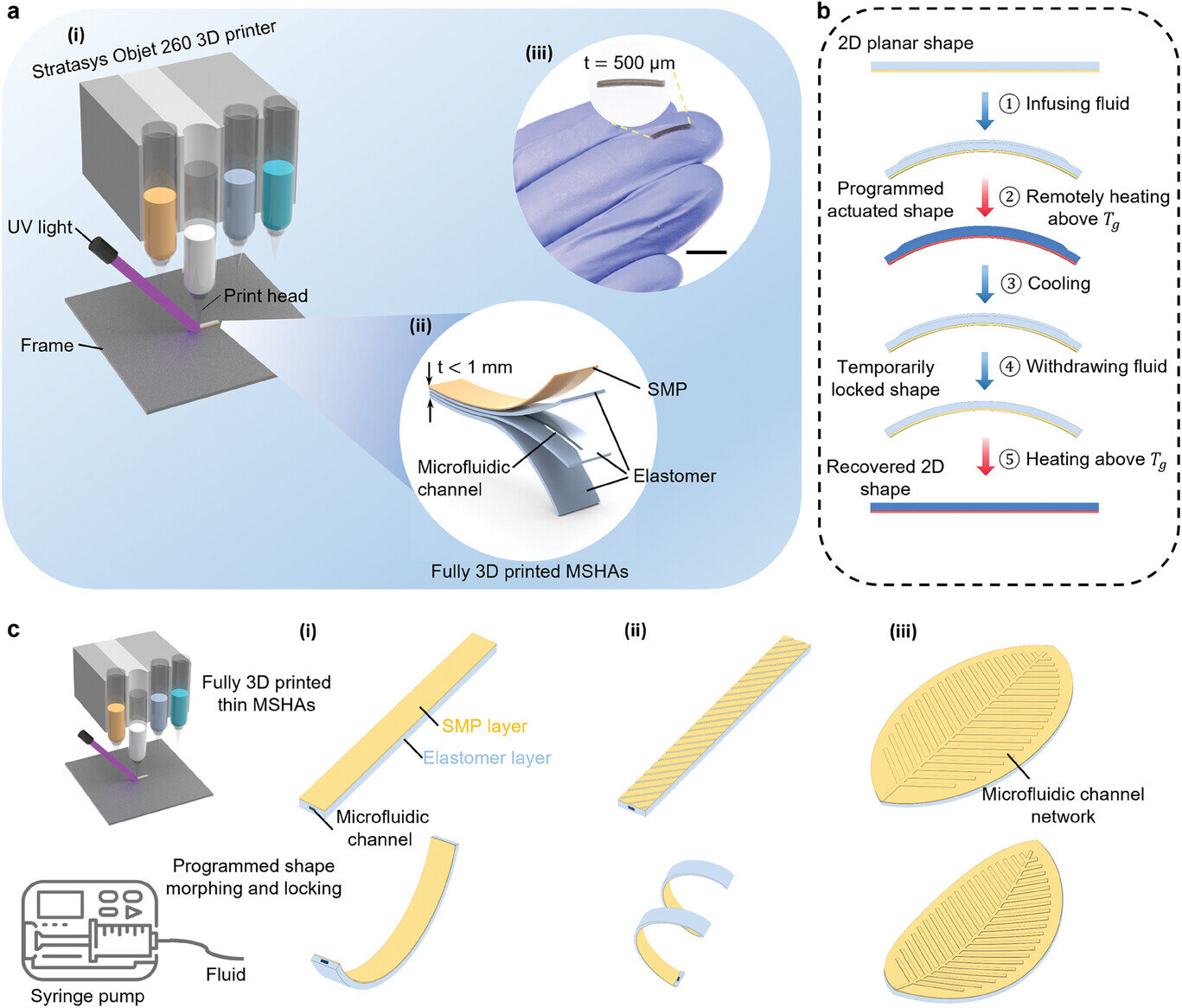
3D 打印微型执行器可以移动小型软机器人,并将其锁定为新形状
用于机器人物体操控的开源通用模型
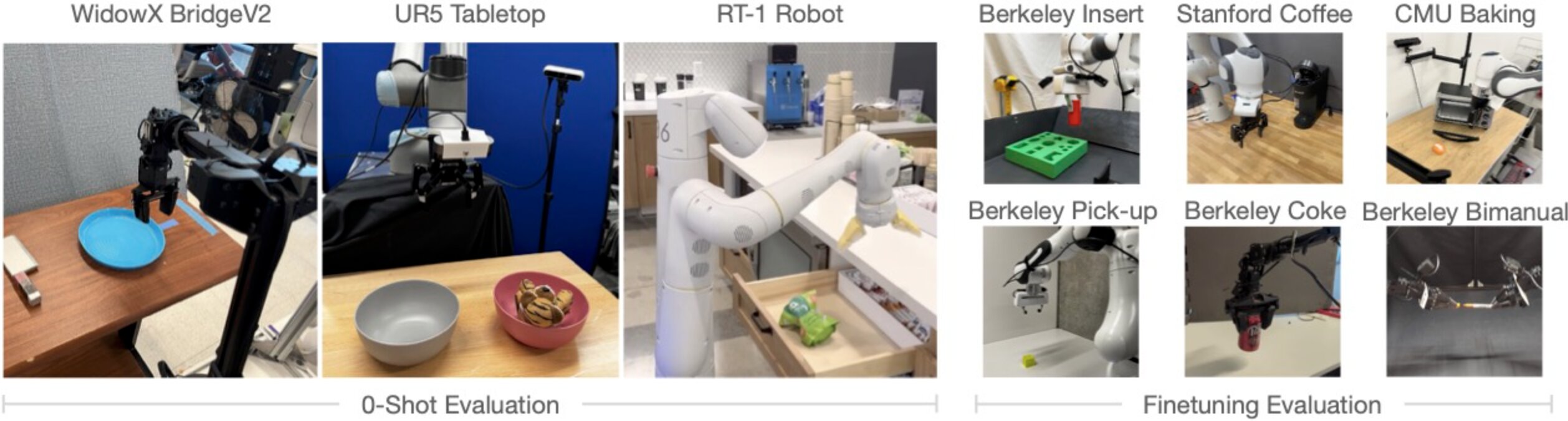
这些是我们测试 Octo 的机器人——你可以看到,机器人手臂种类繁多,从小型到大型,从单臂到双手。Octo 能够控制所有这些机器人。图片来源:Team et al。 ChatGPT 和其他大型语言模型 (LLM) 的公开发布,让世界各地的开发人员开始尝试使用这些模型来增强自己系统的交互能力。然而,类似的可通用的机器人操控模型仍然很少。 加州大学伯克利分校 (UC Berkeley)、斯坦福大学和 CMU 的研究人员最近推出了 Octo,这是一种开源的机器人操控通用模型,可以让不同的机器人系统有效地操控各种物体。该模型以 纸 在服务器 arXiv 上预先发布的文章可以为开发能够处理手动任务的机器人开辟新的途径。 Dibya Ghosh、Homer Walke、Karl Pertsch、Kevin Black 和 Oier Mees 告诉 Tech Xplore:“目前人工智能的进步很大程度上是由大型数据集和大型模型推动的。”“在机器人领域,我们最近组建了 Open X-Embodiment 数据集,这是一个汇集了来自许多研究机构的数据的大型操纵数据集。虽然这个新数据集是一个非常令人兴奋的资源,但当时还没有很多模型可以利用它。” 该研究团队近期的工作主要有两个目标。第一,开发一个可应用于各种机器人的通用机器人模型;第二,创建开源代码,以便其他研究人员将来可以构建类似的模型。 “Octo 是我们所说的‘通才’机器人模型,它是一种神经网络,可以控制许多不同类型的机器人,并使它们执行‘拿起勺子’、‘关上抽屉’、‘擦桌子’等要求,”Ghosh、Walke、Pertsch、Black 和 Mees 解释道。 “成为一名通才并研究多种机器人是关键,因为如果你看看世界各地的研究实验室,你会发现他们中的许多都使用不同的机器人,因此确保 Octo 能够被许多研究人员使用的唯一方法是支持多种机器人。” 在技术研发界,可应用于多个系统的高性能计算工具通常被称为基础模型。ChatGPT 就是此类模型的一个例子,它可用于为各种代理和系统配备自然语言处理 (NLP) 功能。 Ghosh、Walke、Pertsch、Black 和 Mees 表示:“我们希望建立类似的基础模型,但用于机器人控制,或者换句话说,可以控制许多机器人并使它们解决许多不同任务的模型。” “Octo 是朝着这一目标迈出的第一步。它的训练看起来与 ChatGPT 等模型非常相似:我们整理了一个庞大而多样化的数据集,在我们的例子中是机器人数据而不是文本,并训练一个大型模型来预测机器人在当前机器人状态和任务指令下应该执行的下一步动作。” […]
不损害自然的可再生能源转型?这不仅是可能的,而且是必要的

北昆士兰的风力涡轮机。澳大利亚正在将可再生能源项目放在破坏我们赖以生存的物种和生态系统的地方。图片来源:澳大利亚雨林保护区 Steve Nowakowski 地球正面临人类引发的气候危机,需要迅速转向风能和太阳能等低碳能源。但我们也正在经历大规模灭绝 事件. 人类历史上从未出现过如此高的 物种灭绝和生态系统崩溃。 生物多样性危机不仅令人痛心,也是对全球经济的重大威胁。全球一半以上的国内生产总值(GDP)直接依赖于 自然. 世界经济论坛将生物多样性丧失列为 全球经济面临的风险 在未来十年,气候变化和自然灾害之后。 人类引发的气候变化破坏了自然,并导致自然丧失 加剧气候变化。因此,如果人类减缓气候变化的努力最终损害了自然,那我们就等于搬起石头砸自己的脚。 然而,澳大利亚必须面对一个令人不安的事实:我们正在将可再生能源项目放在破坏我们赖以生存的物种和生态系统的地方。 可再生能源蓬勃发展 正在开发的可再生能源项目 损害性质 和 具有文化意义的遗址其他人则遭到社区的反感,或未能 监管障碍。 破坏环境的项目给已经承受巨大压力的物种和生态系统又钉上了一颗钉子。即使是影响相对较小区域的项目也会加剧自然界的“凌迟处死“。 以新南威尔士州西南部拟建的尤斯顿风电场为例。它将需要 96 座涡轮机建于 威兰德拉湖世界遗产区,可能会影响濒危鸟类。 在北昆士兰州, 上伯德金风电场提案 将会清除沙袋鼠、考拉和北方大袋鼯所依赖的 769 公顷濒危物种栖息地。清除的面积几乎是墨尔本板球场的 200 倍。 昆士兰州地图。深绿色表示更多物种的栖息地。现有和拟议的可再生能源项目以鲜红色表示。现有输电基础设施以蓝色表示。来源:Brendan Wintle 等人。来源数据 – 我们准备的以下简单叠加图说明了昆士兰州的问题。该分析是 Boundless Earth 资助的一项研究项目的一部分,详细展示了能源项目、输电线路和国家列出的濒危物种栖息地和生态系统之间的交叉。 “快速通道”也可以是好通道 为了急于建设更多清洁能源项目,州政府和联邦政府承诺“精简” 审批流程. 快速审批只有建立在良好的数据、合理的分析和真正的社区参与的基础上才能产生净社会效益。 我们连续两次审查国家环境法,最近一次是 格雷姆·塞缪尔,确定了提高开发审批效率和为自然带来更好结果所需的条件。答案是什么?在区域范围内进行良好的规划,并以良好的数据为基础。 至少,我们需要知道受威胁或具有重要文化意义的物种和地点、高价值农业和宝贵自然区的位置。拟议成立的新联邦机构——澳大利亚环境信息局将寻求集中现有的生物多样性数据。但要填补重要的知识空白,还需要更多的数据。 良好的规划可以创造共同的目标,带来积极的环境和社会成果,包括为开发商和环保主义者提供确定性。在昆士兰州,大堡礁海洋公园 30 多年来一直享有基于良好数据和社区高度参与的强大规划支持, 并取得了一些保护成果。 相反,糟糕的规划会导致利益相关者和社区两极分化。 削弱信任 利益相关者、开发商和政府之间的矛盾,降低了规划决策的完整性和质量。这导致了土地使用方面的持续冲突,正如在昆士兰州所观察到的那样。 […]
Meta 的人工智能可以翻译几十种资源匮乏的语言
中国机器人开发者希望走出“恐怖谷”

在上海举行的2024中国人形机器人开发者大会上,一位参展商与人形机器人握手。 在中国人形机器人开发者大会上,一个女人的无实体头部做出鬼脸,模仿着旁边笔记本电脑上用户的面部表情,而参加大会的参观者则感到着迷和不安。 那双睁大且略带惊慌的眼睛毫无疑问地表明这项技术确实处于“恐怖谷”领域,但尽管如此,这一领域在中国还是吸引了越来越多的关注,无论是来自投资者还是政府。 周四,在会议室外,约有 30 家公司展示了仿生手、闪烁的面孔和双足机器人,这些机器人在房间里走来走去,当示威者把它们撞倒时,它们能够自行稳住。 参观者姜云飞告诉法新社:“我感觉人形机器人产业正在蓬勃发展……这些展示不再只是概念。它们中的许多已经是实体的,可以进行交互。” 人群聚集在傅氏智能公司的一次演示会上,该公司已开始批量生产 GR-1 双足机器人,据称这是世界首创。 中国国家主席习近平去年 12 月在上海视察时会见了傅氏领导层,这表明中央政府对机器人等新兴技术的重视程度日益提高。 傅氏创始人向《南华早报》透露,习近平曾问过是否可以与双足机器人对话并让它执行基本任务。 在上海举行的 2024 年中国人形机器人开发者大会上,双足机器人在会场上走来走去。 北京并不是唯一的利益相关方。 一位乐观的投资者指着另一家公司生产的类似机器人对法新社表示:“这些机器人将在两三年内得到广泛应用。” 他表示,预计这些养老院将主要用于照顾老年人。由于中国人口老龄化加剧、护理选择减少,一些人认为这一功能至关重要。 在无实体的头部展台上,研究团队表示,他们的最终目标是让 GR-1 等非人性化的机器人看起来更像人类。 “我们希望它们能进入家政服务行业。”上海DROID机器人团队成员朱永桐说。 另一家公司在人性化方面的尝试是为机器人配备可以投射视频眼睛的护目镜。 GravityXR 营销和销售总监 Ennio Zhang 告诉法新社:“作为父母,你可以将自己的数字分身形象植入这个机器人中进行演示,这将使这个机器人能够与你的孩子进行更友好的人机对话。” 戴眼镜的机器人可以植入“数字分身图像” 本周的会议气氛乐观,人们对未来充满期待。 “我认为中国的人形机器人已经发展到了非常前沿的地位,可以与世界其他制造商竞争。”27岁的王姓游客说。 “现在很多机器人看起来还很‘笨拙’,它们仍然看起来像机器人,但一旦我们收集到更多的数据……机器人就会变得越来越像人,”蒋说。 © 2024 法新社 引用: 中国机器人开发者希望走出“恐怖谷” (2024 年 6 月 7 日) 于 2024 年 6 月 7 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1717776232 #中国机器人开发者希望走出恐怖谷 […]
人工智能“淘金热”:聊天机器人训练数据或将耗尽人工编写的文本
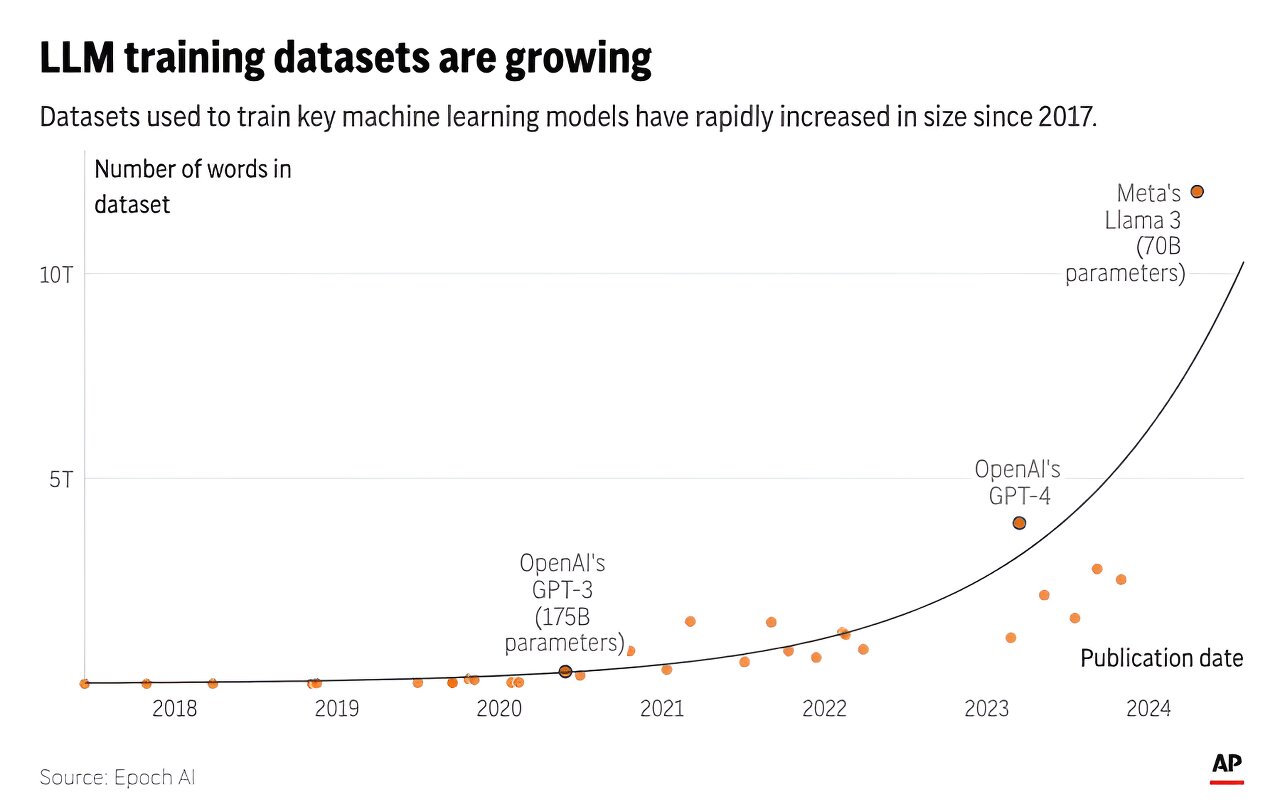
像 ChatGPT 这样的人工智能系统正在吞噬越来越多的人类文字,以变得更加聪明。图片来源:AP Digital Embed 像 ChatGPT 这样的人工智能系统可能很快就会耗尽让它们变得更智能的资源——人们在网上书写和分享的数十万亿个单词。 A 周四发布新研究 研究小组 Epoch AI 预测,大约在本世纪初,也就是 2026 年至 2032 年之间,科技公司将耗尽人工智能语言模型的公开训练数据。 该研究的作者之一塔马伊·贝西罗格鲁将其比作耗尽有限自然资源的“淘金热”,他表示,一旦耗尽人类写作资源,人工智能领域可能难以维持目前的进步速度。 短期内,ChatGPT 制造商 OpenAI 和谷歌等科技公司正在竞相获取并有时付费获取高质量数据源来训练他们的 AI 大型语言模型——例如,通过签署协议来利用来自 Reddit 论坛和新闻媒体的稳定句子流。 从长远来看,不会有足够的新博客、新闻文章和社交媒体评论来维持人工智能发展的当前轨迹,这将给企业带来压力,迫使它们利用现在被视为私人的敏感数据(如电子邮件或短信),或者依赖聊天机器人自己产生的可靠性较低的“合成数据”。 “这里存在一个严重的瓶颈,”Besiroglu 说。“如果你开始遇到数据量方面的限制,那么你就无法再有效地扩展你的模型了。而扩展模型可能是扩展其能力和提高其输出质量的最重要方式。” 研究人员在两年前(ChatGPT 首次亮相前不久)首次在 工作文件预测 2026 年是高质量文本数据的截止日期,这一日期迫在眉睫。自那时以来,很多事情都发生了变化,包括新技术使人工智能研究人员能够更好地利用他们已有的数据,有时甚至对同一来源的数据进行多次“过度训练”。 但这也存在局限性。经过进一步研究,Epoch 预计未来两到八年内公共文本数据将会耗尽。 该团队的最新研究已通过同行评审,并将在今年夏天于奥地利维也纳举行的国际机器学习会议上发表。Epoch 是一家非营利性机构,由旧金山的 Rethink Priorities 主办,由有效利他主义的支持者资助——这是一项慈善运动,已投入大量资金来减轻人工智能的最坏风险。 贝西罗格鲁表示,人工智能研究人员十多年前就意识到,积极扩展两个关键因素——计算能力和海量的互联网数据——可以显著提高人工智能系统的性能。 根据 Epoch 的研究,输入 AI 语言模型的文本数据量每年增长约 2.5 倍,而计算量每年增长约 4 倍。Facebook 母公司 Meta Platforms […]
研究人员发明了一种自主导航的轮腿机器人

来源:Joonho Lee 快速移动的自主移动机器人可以帮助将货物运送到各个地点,有助于解决产品供应链中断的问题。尽管如此,单靠轮式或腿式机器人可能不足以高效、独立地完成运送。 苏黎世联邦理工学院机器人系统实验室的研究人员最近推出了一种新型机器人设计,该设计结合了轮式机器人和腿式机器人的功能。这款机器人是在 科学机器人 纸,使用各种强化学习技术来导航环境,使其能够在驾驶和步行模式之间平稳过渡,适应不同的地形。 “该项目的主要目标是为这种地面机器人构建一个大规模自动驾驶系统,速度是有史以来最快的,”论文合著者 Joonho Lee 告诉 Tech Xplore。“这是对腿部机器人、自主导航和机器人感知领域五年多的研究成果。” 来源:Joonho Lee。 李和他的同事开发的机器人系统以 CERBERUS 团队创建的先前机器人为基础,该团队包括室内无人机公司 Flyability 的研究人员,该团队于 2021 年赢得了 DARPA 地下挑战赛。然而,与 CERBERUS 团队开发的机器人相比,他们的系统具有简化的设计以及更先进的人工智能导航系统。 “传统上,地面机器人的导航规划是使用在线优化方法进行的,”Lee 解释道。“这种方法对于简单的轮式机器人或慢速行走机器人来说效果很好,但对于像我们这样的快速移动机器人(行驶速度可达 20 公里/小时),它们无法提供足够快的导航计划。对于以 2 米/秒的速度移动的机器人,0.5 秒的延迟可能导致 1 米的误差,从而导致灾难性的碰撞。” 来源:Joonho Lee 为了让机器人能够自主导航,研究人员开发、训练并测试了各种分层强化学习技术。最终,他们训练了一个基于神经网络的控制器,该控制器可以处理不同类型的输入,在几毫秒内为机器人创建新的导航计划。 “我们方法的另一大优势是,我们的神经网络控制器完全理解腿式机器人的非线性和复杂动力学,”Lee 说道。“由于它了解机器人在不同地形上以不同速度的行为方式,因此它可以非常有效地引导机器人。” 来源:Joonho Lee 在易于行走的平坦地形上,苏黎世联邦理工学院开发的机器人可以向前行驶,从而充分利用其轮子并最大限度地降低功耗。在更复杂的地形上,使用轮子很难或不可能导航,例如有台阶的地方,机器人可以切换到步行模式。 李和他的同事开发和训练的基于神经网络的控制器可以处理传感数据,以确定机器人在特定地形上行进的最有效方式。这使机器人能够有效地结合传统轮式机器人和腿式机器人的优势。 “轮式机器人效率高,但无法越过高障碍物,”李说。“另一方面,腿式机器人非常擅长克服障碍物和陡坡,但它们的效率非常低,因为它们必须以不规则的模式驱动 10 多个关节。通常,步行机器人最多只能运行 1 小时。有了轮式腿,我们的机器人可以克服与普通步行机器人相同的障碍物,运行时间至少是普通步行机器人的 3 倍。” 来源:Joonho Lee Lee 及其同事开发的控制器并未采用经典的规划和基于模型的控制技术。值得注意的是,这些传统方法在以不确定性和随机干扰为特征的现实环境中通常表现不佳。 相反,该团队的控制器由两个人工神经网络驱动。这些网络处理机器人内置传感器收集的数据,产生合适的行走动作,并决定机器人应该朝哪个方向移动。 […]
科学家开发出复杂网络的快速拓扑识别
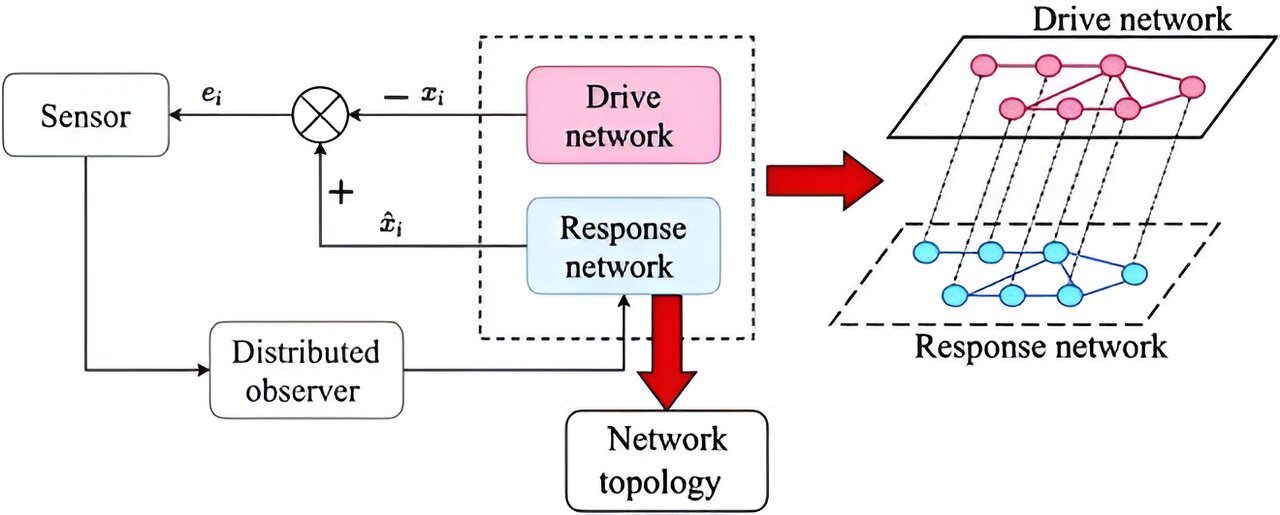
华中科技大学的科学家利用有限时间稳定性理论,在具有时间延迟和非线性相互作用的网络中实现了快速准确的拓扑识别。图片来源:华中科技大学人工智能与自动化学院的余晨。 华中科技大学科研人员与荷兰拉德堡德大学唐德斯大脑、认知与行为研究所合作,开发出一种快速识别网络拓扑的新方法。 他们的新方法, 详细的 在 机器人与仿生系统大大加快了理解复杂动态网络的进程,而复杂动态网络在从电网到交通系统的众多应用中都至关重要。这篇论文的标题是“延迟复杂动态网络的有限时间拓扑识别及其应用”。 这种创新方法名为“延迟复杂动态网络的有限时间拓扑识别”(FT-TIDCN),利用有限时间稳定性理论在表现出时间延迟和非线性相互作用的网络中实现快速准确的拓扑识别。 这一进步解决了网络科学的一个常见挑战:传统识别方法的收敛时间慢,这会妨碍对网络变化和异常的及时响应。 FT-TIDCN 方法在有限时间内实现拓扑识别,绕过了网络分析中常用的较慢渐近方法。它有效地处理了动态网络中非线性耦合和时间延迟引入的复杂性,提供了比以前的模型更准确的结果。 该方法的一个显著应用是在电网管理中,它可以快速检测线路中断,提高电源故障期间的可靠性和响应时间。 研究人员通过两个数值实验证明了 FT-TIDCN 方法的有效性。这些实验展示了该方法在快速准确地识别网络结构方面比传统方法具有优越的性能。特别是在电网中,该方法可以几乎立即检测到线路中断,这对于维持系统稳定性和防止连锁故障至关重要。 该项目首席研究员之一刘志伟博士说:“快速应对电网和通信系统等复杂网络的变化和故障的能力比以往任何时候都更加重要。” “我们的方法不仅加快了这一进程,而且提高了拓扑识别的准确性,这对于这些网络的有效管理和运营至关重要。” 展望未来,研究团队计划将 FT-TIDCN 方法的应用扩展到其他类型的动态网络,并探索其与实时监控系统的集成。这可能会显著改善各个领域,包括交通管理、互联网基础设施等,而网络动态在这些领域发挥着至关重要的作用。 更多信息: Yu Chen 等,时滞复杂动态网络的有限时间拓扑识别及其应用, 机器人与仿生系统 (2024)。 DOI: 10.34133/cbsystems.0092 北京理工大学出版社有限公司提供 引用:科学家开发出复杂网络的快速拓扑识别技术(2024 年 6 月 3 日)于 2024 年 6 月 4 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1717504961 #科学家开发出复杂网络的快速拓扑识别 2024-06-03 18:32:03