
类似蜥蜴的机器人利用受昆虫启发的被动抓手爬墙
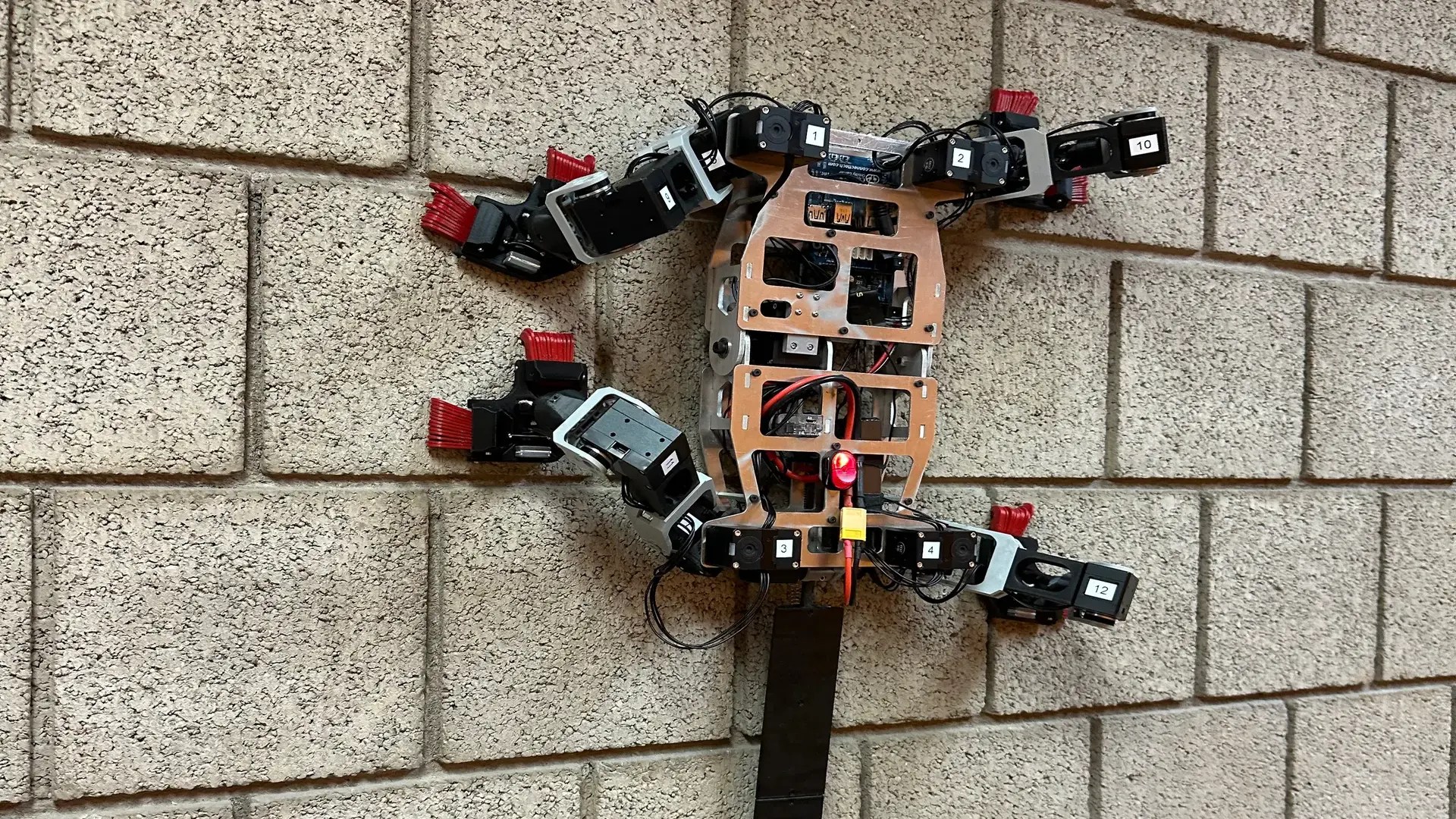
卡内基梅隆大学 (CMU) 的研究人员开发出了一种机器人,它利用仿生抓手来攀爬岩石等棘手的表面。 CMU 团队的设计提供了完全被动的抓手和腕关节,可以实现安全抓握,同时降低重量和复杂性。结合基于优化的控制策略,该系统可以在机器人的抓手之间分配力,以最大限度地降低意外脱离的风险。 据研究人员介绍,这种四足仿生机器人原型已经证明,它可以在地球重力环境下在粗糙的岩石表面和水平的煤渣砌块墙壁上垂直攀爬。 球队的详细信息 研究 发表在该大学机器人研究所的网站上。 先进的微棘夹持技术 攀爬机器人可以探测具有科学价值的地点,而传统的探测车由于地形陡峭而无法到达这些地点。 尽管某些实验机器人针对光滑表面采用了基于吸力的抓取系统,但这种技术对于无法建立密封的岩石等粗糙表面无效。 配备微棘爪的机器人非常适合攀爬岩石峭壁。这些爪子在被抬起进行下一步时会松开钩子。虽然被动式微棘爪依靠机器人的重量进行抓握,但它们在平坦的表面上表现出色,但在凹凸不平的悬崖上却面临挑战,需要采用不同的攀爬策略。 为了克服抓握岩石等粗糙表面的挑战,主动微刺夹持器利用电动执行器将钩子嵌入表面,确保在各个方向上实现电动抓握。 据研究人员介绍,尽管这些抓手非常有效,但它们通常体积庞大、耗能大、机械结构复杂,导致攀爬速度较慢。 这促使卡内基梅隆大学团队设计了轻型不规则斜坡观测机器人 (LORIS),可以解决非结构化的陡峭和垂直地形。 开创性的攀爬技术 卡内基梅隆大学团队在 LORIS 四条腿的末端安装了张开的微棘抓手。该机器人还采用了被动腕关节,使抓手能够对腿部运动做出反应。 通过机载深度感应和微处理器,它可以策略性地移动它的腿,使得相对腿上的抓握器同时固定攀爬表面,使用一种受昆虫启发的攀爬策略,称为定向内抓握(DIG)。 在煤渣块、气泡状玄武岩和矿渣上测试了 LORIS 机器人的垂直攀爬能力。机器人在每个表面尝试攀爬 10 次,直到到达顶部或掉落。 LORIS 机器人原型攀爬煤渣块、气孔状玄武岩、矿渣和石灰华表面。 在煤渣砖上进行的试验表明,采用 DIG 策略后,步骤失败率从 6.4% 降低到 2.3%,并且机器人在 10 次试验中爬上 1 米高的墙壁的次数为 6 次,而未采用 DIG 力时只有 10 次成功。 研究人员声称,LORIS 是第一个“利用微棘产生 DIG 力的四足机器人,其重量为 7 磅(3.2 公斤),是第一个在地球重力环境下在垂直不规则岩壁上进行自由攀爬的同等大小的机器人”。 虽然 LORIS 可以应对各种地形,但其目前的可靠性不足以满足实际使用,因为一次跌落就可能造成灾难性的后果。据研究人员称,大多数煤渣砖试验失败都是由于一个抓手失去抓力。 […]