
模型归还——解决人工智能偏见和版权侵权的关键?
通过情绪跟踪和约束引导生成移情机器反应

优化导盲犬机器人,首先要倾听视障人士的意见

导盲犬和机器导盲犬。 图片来源:ZinjGuo 机器人导盲犬需要具备哪些功能? 最近一篇论文的作者说,问问盲人。 由马萨诸塞大学阿默斯特分校的研究人员领导的一项研究,根据导盲犬用户和训练员的见解,确定如何开发机器人导盲犬,该研究在 CHI 2024:计算系统人为因素会议 (CHI) 上获得了最佳论文奖。 纸张是 发表 在里面 CHI 计算系统中的人为因素会议论文集。 导盲犬为其训练者提供了卓越的自主性和机动性。 然而,只有一小部分视力障碍人士拥有这些伴侣。 这些障碍包括训练有素的狗的稀缺、成本(仅训练费用就达 40,000 美元)、过敏和其他妨碍照顾狗的身体限制。 如果设计师能够获得正确的功能,机器人就有潜力介入犬科动物无法介入的领域,并解决真正的巨大需求。 “我们不是第一个开发导盲犬机器人的人,”麻省大学阿默斯特曼宁信息与计算机科学学院 (CICS) 助理教授、该论文的通讯作者之一 Donghyun Kim 说道。 “已经进行了 40 年的研究,但这些机器人都没有被最终用户实际使用。我们试图首先解决这个问题,以便在开发技术之前,我们了解他们如何使用动物导盲犬以及他们使用什么技术正在等待。” 研究小组对 23 名视障导狗员和 5 名训练员进行了半结构化访谈和观察。 通过主题分析,他们总结了导盲犬当前的局限性、处理人员正在寻找的有效指南的特征以及为未来的机器人导盲犬制定的考虑因素。 这些采访中更微妙的主题之一是机器人自主性和人类控制之间的微妙平衡。 “最初,我们认为我们正在开发一辆自动驾驶汽车,”金说。 他们设想用户会告诉机器人他们想去哪里,机器人会在用户的牵引下自动导航到该位置。 Donghuyn Kim、Ivan Lee、Dog Handler 和 Hochul Hwang。 图片来源:ZinjGuo 不是这种情况。 采访显示,训练员不会将他们的狗用作全球导航系统。 相反,训练员控制整个路线,而狗则负责局部避障。 然而,即使这也不是硬性规定。 狗还可以通过习惯来学习路线,并且最终可以在没有训练员指示的情况下将人导航到常规目的地。 “当训练员信任狗并给予狗更多自主权时,这就有点微妙了,”金说。 “我们不能仅仅制造一个完全被动的机器人,只是跟随处理者,或者只是完全自主,因为那样的话 [the handler] […]
Aurora超级计算机突破百亿亿次障碍

Aurora 的百亿亿次计算能力将为研究人员提供先进的模拟、人工智能和数据分析能力。 图片来源:阿贡国家实验室 Aurora 的速度和人工智能能力将改变科学研究,并在从气候和材料科学到能源存储和聚变能源等世界上一些最紧迫的挑战上取得突破。 美国能源部 (DOE) 阿贡国家实验室的 Aurora 超级计算机已正式突破百亿亿次阈值,在新的 Top500 榜单中每秒计算次数超过 500 亿次。 结果于今天在大会上公布 ISC 高性能 2024 会议 在德国汉堡。 在最新提交的全球最强大超级计算机半年度名单中,Aurora 使用系统 10,624 个节点中的 87% 实现了 1.012 exaflops。 2023 年 11 月首次跻身 Top500 后,阿贡系统保持了第二快超级计算机的地位,并与美国能源部橡树岭国家实验室的 Frontier 一起成为世界上第二个百亿亿次计算机。 Aurora 还在人工智能 (AI) 性能衡量指标中名列前茅,在 HPL-MxP 基准测试中实现了 10.6 exaflops。 “我们很高兴看到 Aurora 加入百亿亿次级俱乐部,”阿贡领导计算设施 (ALCF) 主任迈克尔·帕普卡 (Michael Papka) 说,该设施是美国能源部科学办公室位于阿贡的用户设施。 “我对 Aurora 团队为研究界启动和运行该系统所做的持续努力感到非常自豪。我们迫不及待地想看看整个系统的功能。” […]
生物混合机械手可能有助于解开复杂的触觉

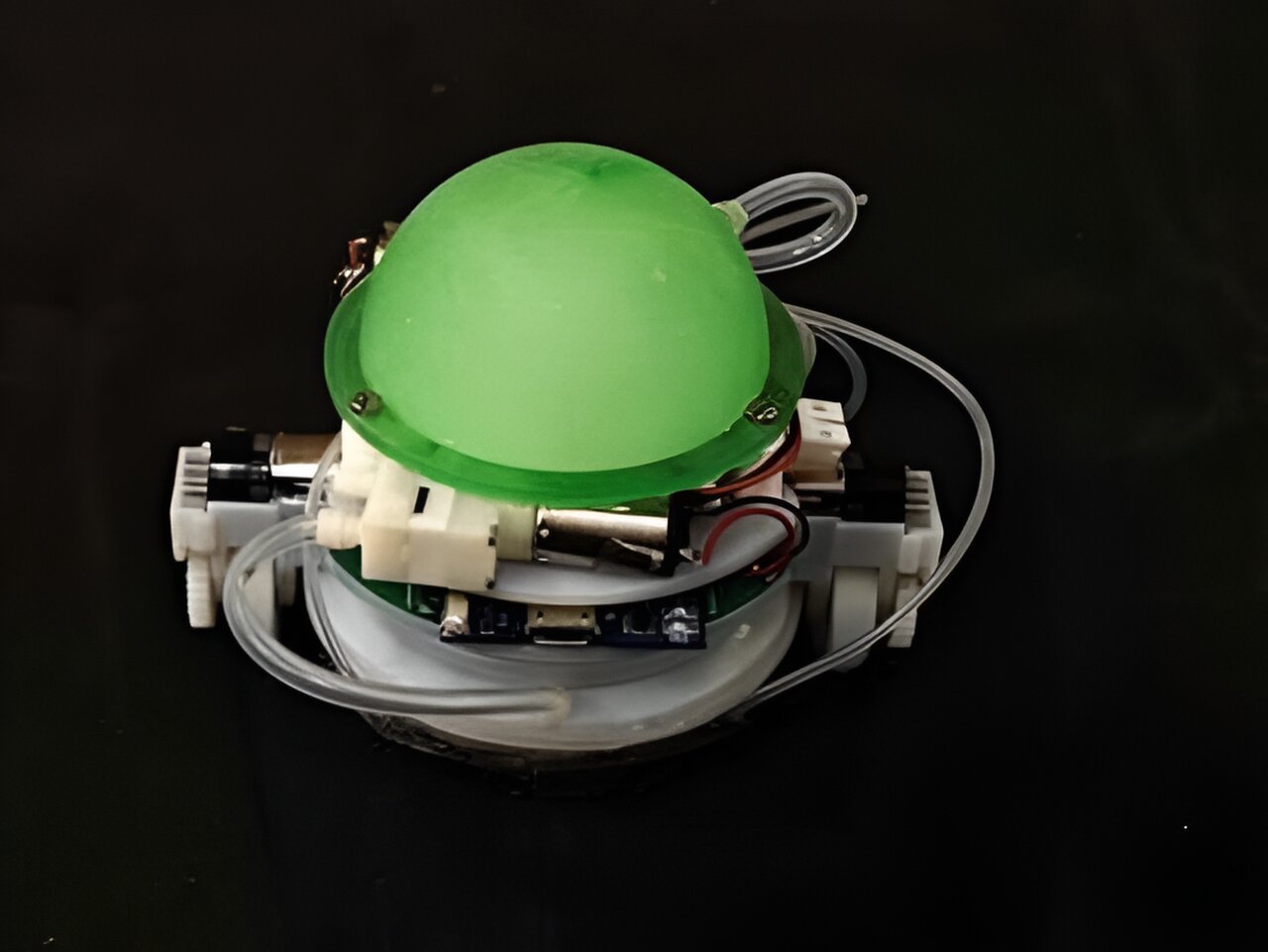
研究人员开发了一种新型生物混合神经假体研究平台,由与生物神经网络电连接的灵巧人工手组成。 图片来源:佛罗里达大西洋大学 脑机接口是一种能够在大脑电活动与外部设备(例如计算机或机器人肢体)之间进行直接通信的设备,使人们能够使用自己的思想来控制机器。 尽管这项技术在很大程度上仍处于试验阶段,但它为脊髓损伤或截肢患者带来了巨大的希望。 通过大脑神经元和外部源之间传输的电生理信号,将思想转化为行动可以帮助他们重新获得对四肢的控制和感觉。 然而,由于问题的复杂性,例如充分理解和恢复物体摩擦、湿度、温度的无数截然不同的触觉感觉,以自然的方式恢复辅助设备的运动控制和感觉仍然是科学的“圣杯” 、疼痛等。 此外,失去抓地力、压力和其他感觉的累积效应使假手不仅难以控制,而且感觉像是身体的不自然延伸,与人类互动的能力有限。 通过神经接口传递触觉的一个主要挑战是从触觉传感器到电刺激参数的映射。 神经修复领域还有很多东西需要学习,因为监管、道德和财务限制仍然是体内实验的巨大挑战。 佛罗里达大西洋大学工程与计算机科学学院的研究人员与佛罗里达州立大学查尔斯·E·施密特科学学院和医学院以及犹他大学合作,开发了一种新型生物混合神经假肢研究平台,该平台由灵巧的人造手组成与生物神经网络电连接。 研究结果, 发表 在日记中 Biomimetics,证明这种生物混合神经假手模型的机器人和神经元行为对不同的神经刺激编码方法敏感,并且可以将机器人触觉集成到人造手的运动控制中。 这一发现为未来使用生物混合研究平台以最小的人类风险来研究神经接口的各个方面提供了可能性。 最终,这可能会导致人们更好地理解复杂的触觉,这对于精确控制手部是必要的。 “迄今为止,很少有肢体缺失的人使用双向神经假手。此外,探索不同电刺激编码方法对触觉反馈对运动控制影响的研究很少,这给该领域的研究进展带来了瓶颈”,资深作者、FAU 海洋与机械工程系教授 Erik Engeberg 博士说。 “我们的生物混合假手模型可用于研究实现假手灵巧控制的最佳方法。” 研究人员使用生物混合模型来研究皮层神经元如何利用临床前研究平台感知机器人的触觉。 他们利用机器人指尖的触觉,通过快速适应或缓慢适应的编码模型来仿生刺激多通道微电极阵列中的神经元。 从传出电极记录的诱发神经元活动被解码以控制机器人手。 研究结果表明,生物神经网络表现出具有快速适应或缓慢适应模式的功能专业化能力,这表现为生物混合手相对于触觉编码方法的显着不同的机器人行为。 此外,当向生物神经网络提供触觉反馈时,卷积神经网络能够以近 98% 的准确度区分快速适应或缓慢适应的编码方法(体外三天的平均值)。 恩格伯格说:“这些新算法的权衡可以以一种难以用人类受试者评估的受控方式直接系统地进行比较,从而能够在人体实验之前识别出更好的算法。” 这种生物混合手模型可以提供一个物理测试平台来评估无数感觉编码和运动解码算法之间的相互作用。 此外,独特的测试平台可以实现和评估新的仿生控制算法。 “开发现实的神经接口临床前模型具有重要价值,它可以减少人类受试者的风险,降低进行研究所需的成本,使进行神经修复研究的机会民主化,并减轻遵守监管要求的负担,” FAU 工程与计算机科学学院院长、博士 Stella Batalama 说道。 “克服实现这一目标的障碍可能会对全世界数以百万计的残疾人产生深远的影响。” 更多信息: Craig Ades 等人,研究触觉编码和感觉运动整合的生物混合机器人手, Biomimetics (2024)。 DOI:10.3390/仿生9020078 由佛罗里达大西洋大学提供 引文:生物混合机器人手可能有助于解开复杂的触觉感觉(2024 年,5 月 15 日),2024 年 5 […]
人类判断力的差异给人工智能带来了问题
受动物大脑启发的自主机器人人工智能游戏规则改变者

“神经形态无人机”飞过花朵图案的照片。 它说明了无人机从角落里的神经形态相机接收到的视觉输入。 红色表示像素变暗,绿色表示像素变亮。 图片来源:Guido de Croon 代尔夫特理工大学的一组研究人员开发了一种无人机,可以利用基于动物大脑工作原理的神经形态图像处理和控制来自主飞行。 与当前在图形处理单元 (GPU) 上运行的深度神经网络相比,动物大脑使用的数据和能量更少。 因此,神经形态处理器非常适合小型无人机,因为它们不需要笨重且大型的硬件和电池。 结果非常出色:在飞行过程中,无人机的深度神经网络处理数据的速度比在 GPU 上运行时快 64 倍,消耗的能源少三倍。 这项技术的进一步发展可能会让无人机飞跃变得像飞虫或鸟类一样小型、敏捷和智能。 研究结果是 发表 在日记中 科学机器人。 向动物大脑学习:尖峰神经网络 人工智能在为自主机器人提供现实应用所需的智能方面具有巨大潜力。 然而,当前的人工智能依赖于需要大量计算能力的深度神经网络。 用于运行深度神经网络的 GPU 会消耗大量能源。 对于无人机等小型机器人来说,这尤其是一个问题,因为它们在传感和计算方面只能携带非常有限的资源。 动物大脑处理信息的方式与 GPU 上运行的神经网络非常不同。 生物神经元异步处理信息,并且主要通过称为尖峰的电脉冲进行通信。 由于发送此类尖峰会消耗能量,因此大脑会最大限度地减少尖峰,从而导致稀疏处理。 受到动物大脑这些特性的启发,科学家和科技公司正在开发新的神经形态处理器。 这些新处理器使它们能够运行尖峰神经网络,并有望更快、更节能。 “尖峰神经网络执行的计算比标准深度神经网络中的计算简单得多,”Jesse Hagenaars 博士说。 候选人和文章的作者之一,“数字尖峰神经元只需要添加整数,而标准神经元必须乘以和添加浮点数。这使得尖峰神经网络更快、更节能。要理解原因,想想如何人类还发现计算 5 + 8 比计算 6.25 x 3.45 + 4.05 x 3.45 容易得多。” 如果神经形态处理器与神经形态传感器(如神经形态相机)结合使用,这种能源效率会进一步提高。 此类相机不会以固定的时间间隔拍摄图像。 相反,每个像素仅在变亮或变暗时发送信号。 此类相机的优点是它们可以更快地感知运动,更加节能,并且在黑暗和明亮环境中都能正常工作。 […]
电影工具可以显着改善虚拟现实环境中的用户体验
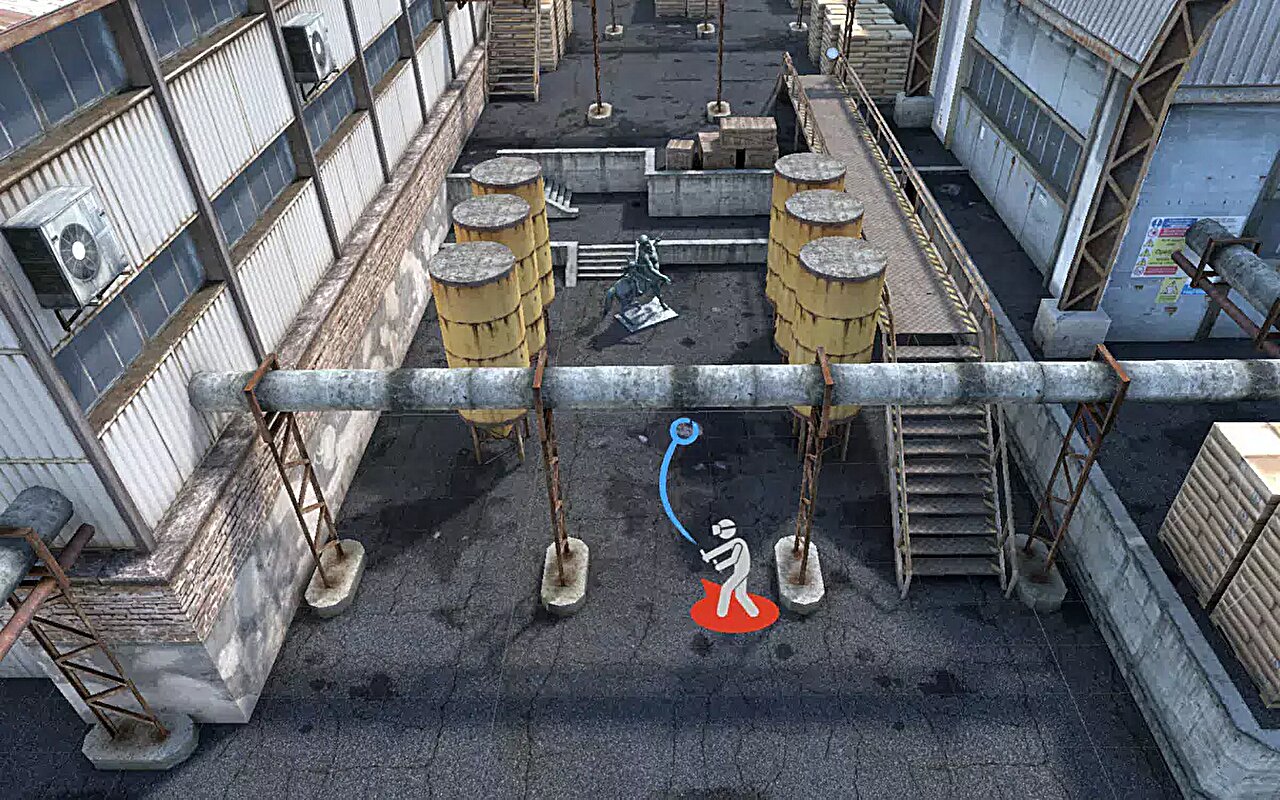
如果没有远程传送,许多用户将因晕动病而无法使用虚拟现实。 不幸的是,远程传送可能会导致用户错过周围环境的重要方面。 图片来源:艾伦·梅德拉 电影摄影技术可以显着提高用户对虚拟环境的参与度,特别是用户在虚拟现实中看到的审美吸引力。 这是赫尔辛基大学计算机科学家最近进行的一项研究的结果。 结果是 发表 五月份在 CHI 计算系统中的人为因素会议论文集。 该团队旨在研究如何利用电影制作中常用的构图和连续性原则来增强虚拟环境中的导航。 构图是指场景中的元素如何相对于观看者定向,而连续性是指镜头之间的摄像机位置如何帮助观看者理解场景中元素之间的空间关系。 赫尔辛基大学计算机科学研究员艾伦·梅德拉 (Alan Medlar) 表示:“利用这些想法,我们开发了一种新的隐形传送方法来探索虚拟环境,在隐形传送后巧妙地重新定位和重新定向用户的视角,以更好地构建场景内容。” 下图显示了这与现代 VR 游戏中使用的常规隐形传送有何不同:从相同的起点(顶部图像),常规隐形传送使用户向前移动,同时保持相同的方向(中间图像),而电影技术可以增加视觉吸引力环境(下图)。 电影技术如何在虚拟现实中使用的两个例子。 每列显示起始位置(顶部)、传送后(中)以及应用电影摄影技术重新构建场景后(底部)。 图片来源:艾伦·梅德拉 保留空间感而不会晕车 研究结果还解决了晕动症的问题——这是 VR 用户的一个常见问题。 通常,为了防止恶心,设计者使用隐形传态作为在数字空间中移动的方法。 研究人员的方法也是基于隐形传态,但其目的是解决与该技术相关的问题。 “在虚拟环境中,远程传送可能会导致空间意识下降,迫使用户在远程传送后重新定位自己,并可能导致他们错过周围环境中的重要元素,”梅德拉说。 “我们使用的电影摄影技术为虚拟环境的设计者提供了一种影响用户在空间中移动时的注意力的方法,从而影响他们对周围环境的感知。” 这项研究对一系列 VR 应用具有重大意义,特别是随着 VR 头显的价格不断提高。 视频游戏、虚拟博物馆、画廊和 VR 电影都可以从这些发现中受益,利用所提出的方法为用户打造更具吸引力和连贯性的体验。 Medlar 相信研究结果将对虚拟现实设计师有实际用途。 “改进 VR 导航并为设计师提供更多影响用户体验的工具的潜在影响是巨大的。” 更多信息: Alan Medlar 等人,《幕后花絮:调整摄影和编辑概念以适应虚拟现实中的导航》 CHI 计算系统中的人为因素会议论文集 (2024)。 DOI:10.1145/3613904.3642412 由赫尔辛基大学提供 引文:电影工具可以显着改善虚拟现实环境中的用户体验(2024 年,5 月 […]
受蜗牛启发的新型机器人可以爬墙
Credit: Tianqi Yue 布里斯托大学的研究人员开发了一种旨在模仿蜗牛运动的机器人。 除了日益创新的机器人导航新方式外,布里斯托尔机器人实验室的团队还为机器人安装了滑动吸力机构,使设备能够在水上滑动,这是蜗牛粘液的替代品,蜗牛粘液也可用作粘合剂。 该研究是 发表 5月13日于 自然通讯,展示了机器人轻松攀爬墙壁的一种新颖方法,有可能改变难以接近的表面(例如风力涡轮机叶片、船体、飞机和摩天大楼玻璃窗)的自动检查方式。 这些特性也赋予滑动吸力未来在机器人领域的应用潜力,包括工业抓取、攀爬、户外和运输。 蜗牛只需一个高有效负载吸盘即可在表面上稳定滑动,为下一代攀爬机器人提供高效的粘附运动机制。 蜗牛滑动吸力行为的关键因素是粘液分泌,它可以减少摩擦并增强吸力。 倒挂。 图片来源:布里斯托大学 主要作者Tianqi Yue解释说:“人们知道蜗牛具有稳定的粘性滑动行为,即使它们携带着很重的有效载荷,在这种情况下是一个贝壳。 “受此启发,我们提出了‘滑动吸力’机构,开发了滑动吸力机器人,实现了与蜗牛媲美的滑动能力。” 由于粘液在滑动吸力机构中发挥着重要作用,因此团队使用水作为廉价、易于获取且清洁的人造粘液来帮助机器人滑动,同时保持吸力。 他们优化了吸盘的材料,设计了机器人的机电系统,并能够演示机器人的实际应用,例如承载200g质量和避障。 该机器人还展示了高负载滑动能力,可承载 1 公斤质量,比自身重 10 倍。 在墙上。 图片来源:布里斯托大学 滑动吸力使轻型机器人能够垂直和倒置滑动,实现高速,并且在静态粘附过程中不需要能量。 天奇补充道:“通过滑吸机器人的性能,我们证明了滑吸机器人能耗低、粘附效率高、安全性高、承载能力高、复杂性低,同时只留下快速蒸发的水迹。 “我们研究中最令人兴奋的发现是,所提出的滑动抽吸机构是一种新颖的清洁攀爬策略,将显着推进下一代攀爬机器人的开发。” 更多信息: Tianqi Yue等人,受蜗牛启发的水增强软滑动吸力,用于攀爬机器人, 自然通讯 (2024)。 DOI:10.1038/s41467-024-48293-2 由布里斯托大学提供 引文:新型蜗牛机器人可以爬墙(2024 年,5 月 14 日),2024 年 5 月 15 日检索自 本文件受版权保护。 除出于私人学习或研究目的的公平交易外,未经书面许可不得复制任何部分。 内容仅供参考。 1715754239 #受蜗牛启发的新型机器人可以爬墙 2024-05-14 14:36:21
索尼任命两名高管领导 PlayStation

图片来源:Pixabay/CC0 公共领域 索尼周一表示,两名资深高管将接替 3 月份退休的吉姆·瑞安 (Jim Ryan),担任其强大游戏部门的首席执行官。 一份声明称,Hermen Hulst 和 Hideaki Nishino 将向索尼互动娱乐 (SIE) 集团董事长 Hiroki Totoki 汇报工作,后者一直担任临时首席执行官。 行业观察家指出,拆分索尼部门的领导层并不常见。 赫尔斯特将担任新命名的工作室业务集团的首席执行官,该集团包括 PlayStation 的开发商,并负责将 PlayStation 品牌扩展到电视和电影领域。 西野将领导平台业务集团,其中包括控制台硬件、技术和配件。 他还将负责与主要出版商和独立工作室的关系。 Ryan 于 1994 年加入 SIE,并在 2019 年开始领导该部门之前担任过多个高级职位,并因使 PlayStation 5 成为迄今为止最成功的游戏机而受到赞誉。 PlayStation 5 于 2020 年推出后,其生产最初受到冠状病毒大流行导致的全球半导体短缺的打击。 随后 PlayStation 迅速占据一席之地,但随着科技行业遭遇裁员潮,该公司在 2 月份宣布了一轮裁员。 PlayStation 5 还面临着来自任天堂 Switch 的激烈竞争,在科技巨头微软收购了《使命召唤》制造商动视暴雪之后,它可能会与微软的 Xbox 展开更激烈的竞争。 在索尼阻止微软大规模收购动视暴雪的斗争中,瑞安处于最前沿,但失败了。 瑞安领导下的索尼斥巨资收购游戏工作室。 […]