
采用石墨烯和液晶设计的新型软机器人夹持器
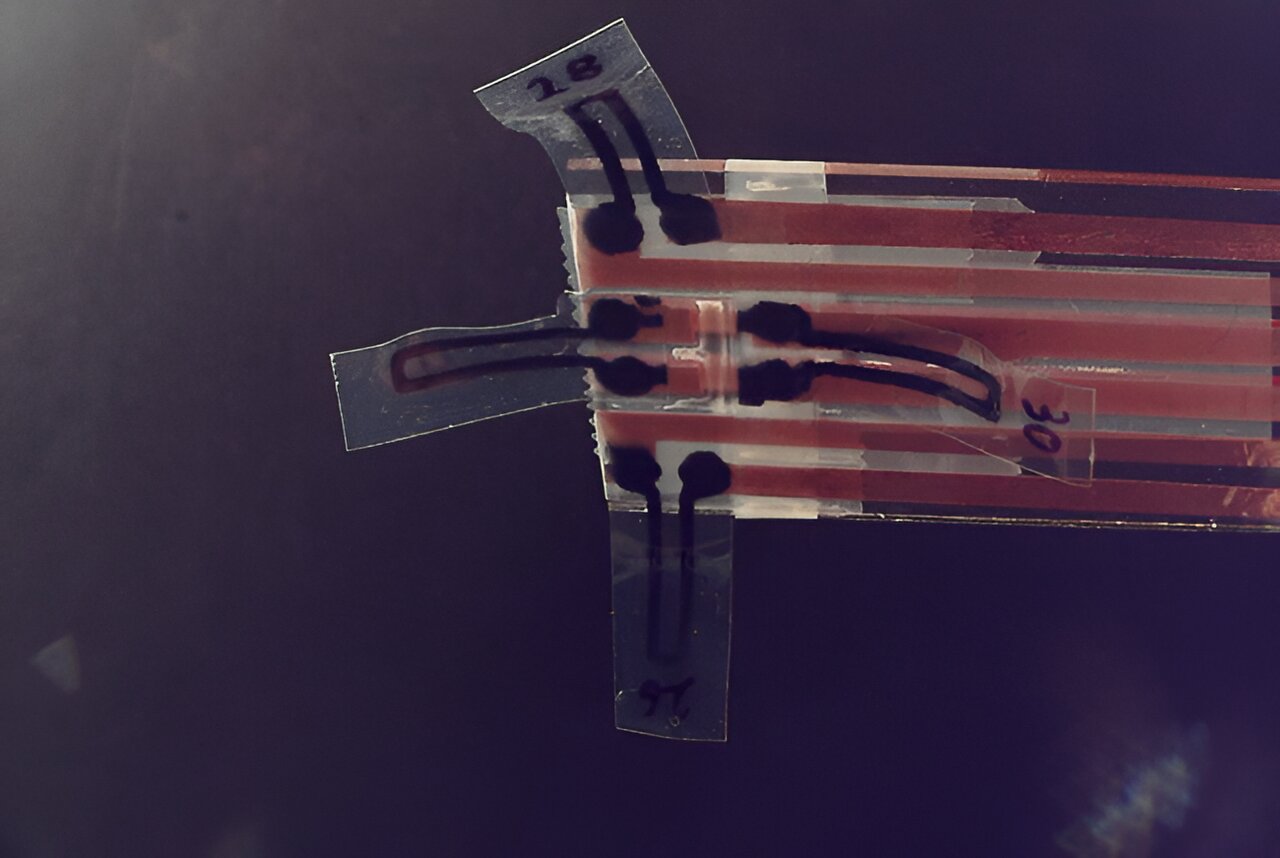
图片来源:劳拉·范·哈森东克 埃因霍温的研究人员开发出一种由液晶和石墨烯制成的软机器人“手”,可用于设计未来的手术机器人。这项新工作刚刚 发布 在期刊上 ACS 应用材料与界面。 在我们未来的医院里,软体机器人可能会被用作手术机器人。但在这之前,研究人员需要弄清楚如何精确控制和移动这些可变形的机器人。此外,许多当前的软体机器人都含有金属,这意味着它们在富含水的环境(如人体)中的使用相当有限。 由博士候选人 Laura van Hazendonk、Zafeiris Khalil(作为其硕士研究的一部分)、Michael Debije 和 Heiner Friedrich 领导的埃因霍温理工大学研究人员设计了一种由石墨烯和液晶(均为有机材料)制成的软机器人手或夹持器。这为未来此类设备在手术中安全使用提供了可能性。 机器人对我们的世界有着巨大的影响。例如,在工业领域,机器人制造汽车和电视。在医院,机器人(如达芬奇机器人手术系统)协助外科医生进行微创手术。有些人甚至在家里用机器人打扫卫生。 “社会已经变得依赖机器人,我们正在想出新的方法来使用它们,”化学工程和化学系博士研究员 Van Hazendonk 说道。“但在设计新的使用方法时,我们需要考虑使用不同类型的材料来制造它们。” 软思维 Van Hazendonk 提到的不同材料包括流体、凝胶和弹性材料,这些材料都很容易变形。“通常,机器人由金属制成,金属既坚硬又坚硬。但在某些应用中,由坚硬材料制成的机器人会限制机器人的性能,”Van Hazendonk 说。“解决方案是考虑柔软性。” 在软机器人技术中,目标是用流体或凝胶等材料制造机器人,这些材料可以在特定情况下变形,然后可以像用传统刚性和硬质材料制成的机器人一样行动。 软机器人有望产生重大影响的一个领域是外科手术。Van Hazendonk 补充道:“对于外科医生来说,许多手术可能既复杂又精细,因此需要外科医生拥有精准的灵活性。有时这是不可能的,他们就会求助于机器人。 “但刚性机器人可能无法轻松进入某些区域。这就是软机器人可以脱颖而出的地方,我们的目标是提供潜在的新帮手,例如用于夹紧和缝合手术中使用的设备。” 转向诺贝尔材料 在他们的研究中,Van Hazendonk 和她的同事选择使用不同类型的可变形材料——液晶——以及石墨烯,制作出一种带有四个可控制和可变形“手指”的软夹持装置或“手”。 有趣的是,在过去 30 年左右的时间里,液晶和石墨烯都与诺贝尔物理学奖有着直接或间接的联系。早在 1991 年,皮埃尔-吉尔斯·德·热内斯 (Pierre-Gilles de Gennes) 就因其在液晶等复杂物质中的有序性方面的工作而获奖。2010 年,安德烈·海姆 (Andre Geim) 和康斯坦丁·诺沃肖洛夫 (Konstantin Novoselov) 因其在石墨烯方面的工作而获奖——石墨烯是一种超强材料,它也是透明的,并且是电和热的有效导体。 “液晶的行为取决于其受到的激发或干扰。当它流动时,它就像液体一样。但在特殊情况下,液体中的分子可以自行排列,形成规则的图案或结构,例如在高倍显微镜下在固体材料中看到的晶体,”Van Hazendonk […]