
一种更有效的多用途机器人技术 | 麻省理工学院新闻
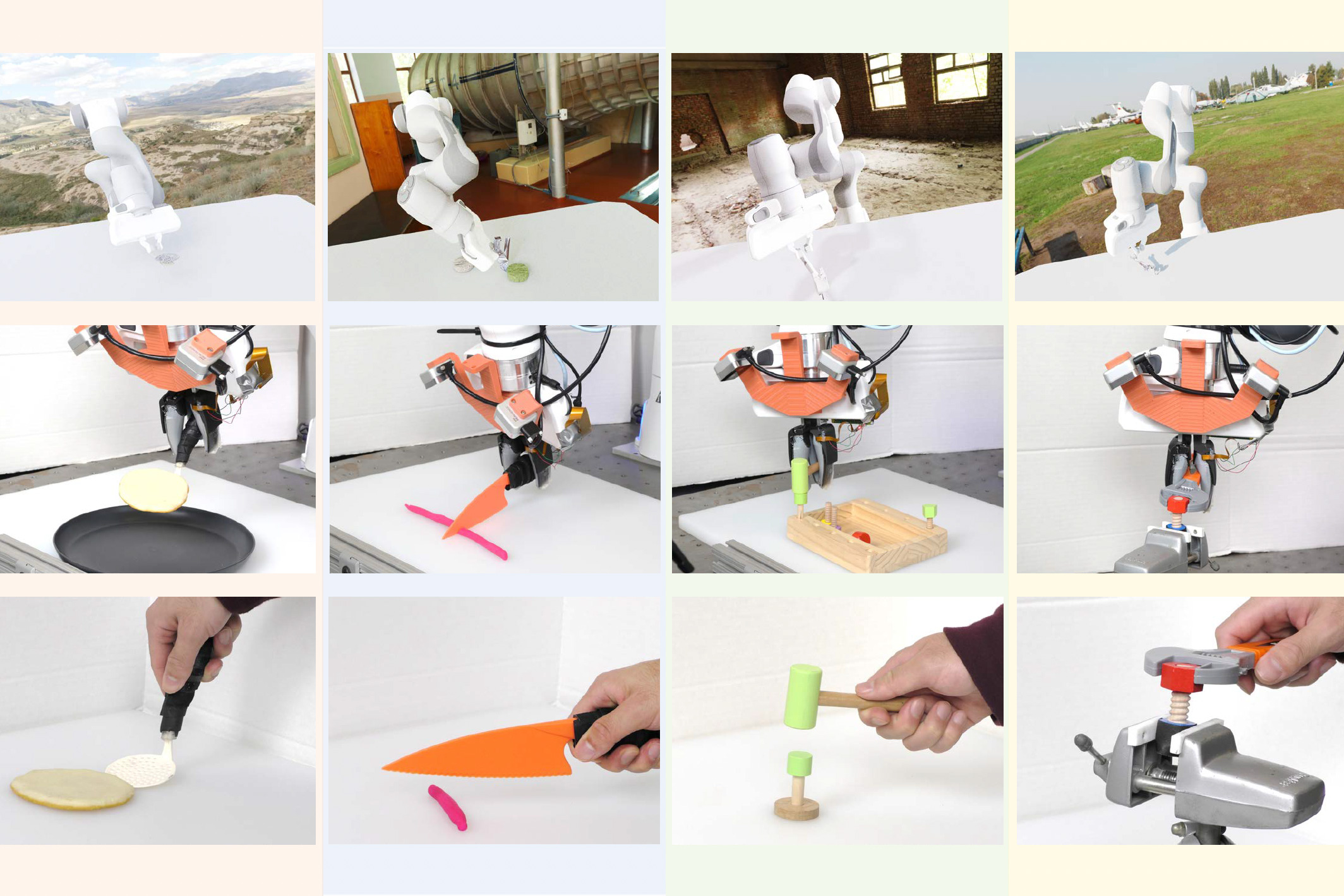
假设你想训练一个机器人,让它了解如何使用工具,然后可以快速学会用锤子、扳手和螺丝刀修理房子。要做到这一点,你需要大量展示工具使用的数据。 现有的机器人数据集在形式上千差万别——例如,有些包括彩色图像,而另一些则由触觉印记组成。数据也可以在不同的领域收集,例如模拟或人类演示。每个数据集可能捕获一个独特的任务和环境。 很难在一个机器学习模型中高效整合来自如此多来源的数据,因此许多方法只使用一种类型的数据来训练机器人。但以这种方式训练的机器人,由于任务特定数据相对较少,通常无法在陌生的环境中执行新任务。 为了训练更好的多用途机器人,麻省理工学院的研究人员开发了一种技术,使用一种称为扩散模型的生成式人工智能,将跨领域、跨模式和跨任务的多种数据源结合起来。 他们训练一个单独的扩散模型来学习使用一个特定数据集完成一项任务的策略或政策。然后,他们将扩散模型学习到的策略组合成一个通用策略,使机器人能够在各种设置中执行多项任务。 在模拟和真实世界实验中,这种训练方法使机器人能够执行多种工具使用任务,并适应训练期间未见过的新任务。与基线技术相比,这种方法称为策略组合 (PoCo),可将任务性能提高 20%。 “解决机器人数据集中的异质性就像先有鸡还是先有蛋的问题。如果我们想使用大量数据来训练一般的机器人策略,那么我们首先需要可部署的机器人来获取所有这些数据。我认为利用所有可用的异构数据,就像研究人员对 ChatGPT 所做的那样,是机器人领域迈出的重要一步,”电气工程和计算机科学 (EECS) 研究生、论文的主要作者 Lirui Wang 说道。 关于 PoCo 的论文。 王的合著者包括机械工程研究生 Jialiang Zhao;EECS 研究生 Yilun Du;脑与认知科学系 John and Dorothy Wilson 视觉科学教授、计算机科学与人工智能实验室 (CSAIL) 成员 Edward Adelson;以及资深作者 Russ Tedrake,EECS、航空航天和机械工程丰田教授、CSAIL 成员。这项研究将在机器人:科学与系统会议上发表。 合并不同的数据集 机器人策略是一种机器学习模型,它接收输入并使用它们来执行操作。将策略视为一种策略是一种思考方式。对于机械臂而言,该策略可能是一条轨迹,或一系列移动机械臂的姿势,以便机械臂拿起锤子并用它敲钉子。 用于学习机器人策略的数据集通常很小,并且专注于一项特定的任务和环境,例如将物品装入仓库中的箱子中。 “每个机器人仓库都会产生数 TB 的数据,但这些数据只属于处理这些包裹的特定机器人装置。如果你想用所有这些数据来训练一台通用机器,这并不理想,”王说。 麻省理工学院的研究人员开发了一种技术,可以获取一系列较小的数据集(例如从许多机器人仓库收集的数据集),从每个数据集中学习单独的策略,并以一种使机器人能够推广到许多任务的方式组合这些策略。 它们使用一种称为扩散模型的生成式 AI 模型来表示每项策略。扩散模型通常用于图像生成,它通过迭代优化输出来学习创建与训练数据集中的样本相似的新数据样本。 但研究人员并没有教扩散模型生成图像,而是教它为机器人生成轨迹。他们通过在训练数据集的轨迹中添加噪声来实现这一点。扩散模型会逐渐消除噪声并将其输出细化为轨迹。 这种技术被称为 扩散政策,之前由麻省理工学院、哥伦比亚大学和丰田研究所的研究人员提出。PoCo 以这项扩散政策工作为基础。 该团队使用不同类型的数据集来训练每个扩散模型,例如一个数据集来自人类视频演示,另一个数据集来自机械臂的远程操作。 然后,研究人员对所有扩散模型所学习到的单个策略进行加权组合,迭代地优化输出,使得组合策略满足每个单个策略的目标。 大于各部分之和 “这种方法的好处之一是,我们可以结合各种策略,实现两全其美。例如,在现实世界数据上训练的策略可能能够实现更高的灵活性,而在模拟上训练的策略可能能够实现更高的泛化能力,”王说。 […]
工程师 – 数字孪生用于改善机器人的建筑环境

据研究人员介绍,当前研究机器人与城市、建筑物和人行道等建筑环境互动的方法涉及真实测试和物理实验,这些方法成本高昂、耗时费力。 为了解决这些限制,首席研究员、 科学技术发展局 他的团队利用数字孪生技术来确定机器人建筑环境设计指南的实用性。 研究人员还将机器人原型和环境建模为数字孪生,以检查这些环境中的特定机器人行为。 莫汉副教授在一份声明中表示:“确保机器人能够在建筑环境中导航和有效操作对于其广泛采用和接受至关重要。” “数字孪生方法有几个关键优势,包括能够模拟真实场景、实现机器人交互的虚拟测试,并在物理实施之前提供对设计指南合规性的洞察。” 用于评估建筑环境中机器人包容性的数字孪生系统概述 – 科学技术发展局 研究人员将该方法分为三个阶段,还用于实时监控、危险识别和部署前训练机器人算法。 首先,研究人员对环境进行了现场记录。如果在建筑设计过程中进行记录,则可以从建筑信息模型 (BIM) 中收集数据。当建筑物已经建成时,可以使用激光扫描或摄影测量技术生成点云数据进行处理。 第二步,数字化重点是使建筑环境的数字模型适合机器人模拟软件。在此步骤中,点云数据可以重建到数字空间中,并用于生成建筑环境的 3D 模型。 最后,设计并分析了数字模型。使用机器人模拟软件中的数字化环境模型,可以在环境中测试各种机器人的行为和交互。根据现有的建筑环境设计指南制作虚拟场景,并对机器人的导航、路径规划和与周围环境的交互进行评估。 在一个案例研究中,副教授 Mohan 使用数字孪生在六种不同的环境中测试了四种不同的清洁机器人,这些环境都符合无障碍设计指南。 在这四个机器人中,一个机器人完成了最多的目标,在模拟环境中表现最好。研究人员指出,机器人的包容性并不总是意味着机器人的性能效率,但包容性环境确实能提高机器人的可及性,使它们能够正确完成任务。 随着机器人越来越多地应用于清洁、物流和建筑维护等城市应用,本研究的结果旨在帮助改善建筑环境的设计指南,以适应和增强机器人在以人为本的空间中的使用。 展望未来,研究团队的目标是扩展当前的方法,并通过使用设计、人工智能和技术自主生成所需的基础设施修改,以提高移动机器人的可访问性。莫汉副教授还希望制定一套设计指南和建议,以构建机器人友好型基础设施。 研究论文《增强机器人在建筑环境中的包容性:数字孪生辅助评估设计指南合规性》可完整阅读 这里。 1717411122 2024-06-03 10:15:29 #工程师 #数字孪生用于改善机器人的建筑环境
中国这种大型、凶猛、手持枪支的机器狗会成为未来战争的主力吗?

在最近 军队 与柬埔寨进行演习, 中国 释放了一系列 机器人 这些“狗”装备着步枪,准备为北京进行城市作战。这些凶猛机器的行动画面让我们看到了未来 机器人 可以在战争时期取代人力,并引发了关于美国在与 中国。 “它可以成为我们城市作战行动的新成员,代替我们的成员进行侦察和识别 [the] 一名名叫陈伟的中国士兵在谈到这支部队的最新成员时说道,“要打赢这场战争,必须打中敌人,打中目标”。 中国军队据国家电视台中央电视台报道。 “执行任务的时候,它可以把侦察画面实时传输到指挥所。”另一名战士杨胜志说。 在演习中, 中国 以及柬埔寨的金龙 2024 演习,视频中展示了这只狗跳跃、行走和向不同方向倾斜的画面。视频中还拍摄了它蹲下、向后移动和开枪的画面。据中央电视台报道,它甚至可以规划自己的路线并避开障碍物。 中国并不是唯一一个对在战争中使用机器人感兴趣的国家,而且当然也不是第一个进入这一领域的国家:美国几十年来一直在试验机器人战争。 美国军方首次使用机器人作为作战工具是在 阿富汗例如,2002 年,四台名为“Hermes”、“Professor”、“Thing”和“Fester”的机器人会在部队之前进入建筑物,以侦察环境并防止美国人员伤亡。即便如此,这些机器人也能够携带榴弹发射器和 12 口径霰弹枪,以及 12 台摄像机。 伊拉克,数千台机器人被投入战场。 中国和柬埔寨军方共同参加机器战犬演示。 Tang Chhin Sothy/>< 通过盖蒂图片社 从那时起,美国军方一直在扩展这一概念。无人机系统(无人机)的例子比比皆是,已经改变了战争方式,包括 乌克兰冲突。 这 美国海军 一直在与无人驾驶和自主船舶合作;今年早些时候, 美军举行演习 以增强其对人类、机器人和机器如何在战场上协同工作的理解。 战略与国际研究中心未来战争、游戏和战略高级研究员本杰明·詹森表示,尽管中国发布的视频具有震撼力,但与美国相比,其在机器人上安装枪支的尝试并不一定那么令人印象深刻。 “如果他们真的想展示这个,我们不应该太担心,”詹森告诉《每日野兽》。“这是一支基本的突击步枪,从外观上看相当粗糙,装在一只仿制的机器狗上,”他补充道,指的是中国政府的机器狗看起来确实很像 波士顿动力公司的机器狗, 其能力多年来已在美国公开展示。 “这就像是最糟糕的仿冒品,”詹森说,他也是海军陆战队大学高级作战学院的战略研究教授。 在战争中使用机器人有很多好处,而中国似乎认为,使用机器人或自主机器进行某些行动可以释放人力来执行其他行动,并减少冲突中的人员伤亡。 但詹森警告说,中国或任何其他军队可能不会拥有完全由机器人组成的人民解放军 (PLA)。 “这怎么会让它……比起解放军士兵配备突击步枪更有效或更不有效呢?从某种意义上说 [it’s] “它更有效,因为它无所畏惧,你可以在崎岖的地形上操纵它,布置火力基地,”他说。“但在很多方面,它的效率较低,因为谁来做抽查……谁来做‘SPORTS’——这是当你的武器卡住时的缩写——谁来清理枪管?所以它可能看起来像是在取代人,但它只是改变了人在战斗中的角色。” 人类仍可能在幕后运作,进行战术层面的协调。 “这不是 终结者 […]
太空太阳能发电始于科幻小说,至今仍是科幻小说

场景:未来某个时候,一个名为 Converter 的太空太阳能发电站投入使用。角色:两名宇航员,Powell 和 Donovan,以及一个名为 QT-1 的机器人(它的人类朋友称它为“Cutie”)。情节:宇航员正在训练 Cutie 接管空间站的运营,包括收集太空中的太阳能,然后将其作为强烈的微波束引导到地球上。 这是艾萨克·阿西莫夫 1941 年短篇小说的背景 “原因。” 故事主要围绕 阿西莫夫机器人三定律 以及人类与机器人的关系。但该站本身值得再看一看。很明显,阿西莫夫不知道像转换器这样的系统实际上是如何工作的,除了最基本的术语。以下是鲍威尔试图向 Cutie 解释的内容: “我们的光束为这些星球提供能量,这些能量来自我们附近的一个巨大白炽灯。我们称这个灯为太阳,它位于空间站的另一边,你看不到它。” 利用太空中的太阳能当然是一个诱人的想法。十年前,我们在 日本宇宙航空研究开发机构 目标是在 2031 年之前建成一座 1 千兆瓦的太阳能发电站。作为朝这个方向迈出的一步,JAXA 表示将 证明 明年将有一颗小型卫星从 400 公里的高空向地球传输 1 千瓦的电力。我们还报道过 加州理工学院的 SSPD-1 演示项目 和 亿万富翁捐赠 1 亿美元 谁为其提供资金。 太空太阳能项目将“浪费资金,而这些资金本可以用来改善风险较低的方式来支持可再生能源,例如电池、氢气和电网改进”。 例如, 英国 Space Solar 估计 它将需要 68 艘 (!) SpaceX 星舰发射才能将建造一个 1.7 公里长的太阳能电池阵列所需的所有资产送入轨道。别介意 […]
两项研究为无人驾驶汽车提供更“人性化”的视野 | 技术
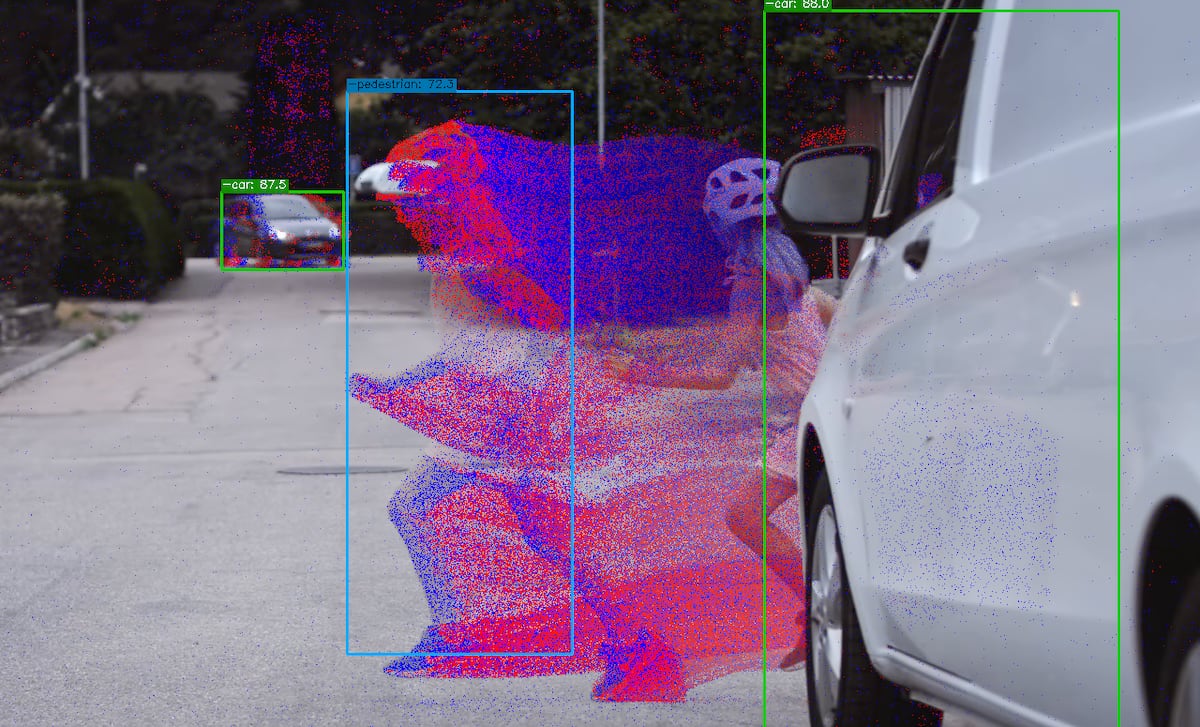
自动驾驶汽车依赖于视觉这种对人类至关重要的感觉。这不仅仅是机器能够看到(它已经做到了),还包括在几毫秒内观察、分析、辨别和处理。挑战在于在恰当的时间内实现人类的这一特性,以做出必要的决定。例如,对于机器来说,看到赛道旁边的一棵树很容易。困难的是知道这不是一个会移动或挡路的物体,而相反,如果它是行人。科学杂志 自然 本周三发布了这方面的两项进展:一种能够以最少的信息对事件做出快速反应的处理器,以及一种以更低的延迟(响应时间)提高机器视觉精度的新系统(算法)。 这些研究对于自动驾驶汽车或机器人技术的发展至关重要,并且已经在以下领域取得了进展: 微电子研究所 (Imse)位于安达卢西亚首都,由高等科学研究委员会(CSIC)和塞维利亚大学提供。三星和索尼等跨国公司已经使用该公司出售的专利 先知。 更多信息 他出版的两部作品 自然 它们是基于注视点的这些系统的创新,注视点是人类的一种机制,它使我们能够在视觉聚焦的区域中最大化分辨率,同时在不相关的周边视觉区域中降低分辨率。通过这种方式,信息量减少了,但保持了在几毫秒内做出决策所必需的数据的视觉识别能力。 关键在于准确解读场景并快速检测动作,以便立即做出反应。传统相机可以捕捉一帧图像并以非常高的分辨率再现,但所有这些信息都必须经过处理和区分,这需要时间和资源投入,与自动驾驶或先进机器人所需的即时决策不相容。 进步之一 这份文件由美国宾夕法尼亚大学研究员 Daniel Gehrig 和瑞士苏黎世大学机器人学教授 Davide Scaramuzza 共同签署。两人都解决了高分辨率彩色图像决策的难题。这些图像需要大带宽才能以必要的流畅度进行处理,而降低这种高容量的代价是更大的延迟、更长的响应时间。另一种方法是使用事件相机,它可以处理连续的脉冲流,但会牺牲精度。 图像显示了彩色摄像机的信息和事件摄像机的事件(蓝点和红点);边界框显示了算法对行人的检测。瑞士苏黎世大学机器人与感知小组 为了解决这些限制,作者开发了一种混合系统,可以实现有效的物体检测,同时将延迟降到最低。该算法结合了两个摄像头的信息:一个摄像头会降低彩色帧速率以减少所需的带宽,另一个摄像头会补偿延迟损失,从而确保可以检测到快速移动的物体,例如行人和汽车。研究人员表示:“这些结果为高效、准确的物体检测铺平了道路,尤其是在极端情况下。” “这是一个突破。目前的驾驶辅助系统,例如 MobileEye 的系统,已内置于全球 1.4 亿多辆汽车中,采用每秒拍摄 30 帧或每 33 毫秒拍摄一张图像的标准摄像头。此外,它们至少需要三帧才能可靠地检测到行人或汽车。这使得启动制动操作的总时间缩短至 100 毫秒。我们的系统使我们能够将这个时间缩短到 1 毫秒以下,而无需使用高速摄像头,因为这将产生巨大的计算成本,”Scaramuzza 解释道。 当前系统启动制动操作的总时间增加到 100 毫秒。我们的算法允许我们将此时间缩短到 1 毫秒以下,而无需使用高速摄像机。 苏黎世大学机器人学教授 Davide Scaramuzza(瑞士) 研究人员表示,该技术已“转让给一家顶级公司”。他补充道:“如果获得批准,从概念验证到影响再到最终实施通常需要很多年。” 清华大学类脑计算研究中心 (CBICR) 主任石路平与他的团队一起开发了 芯片(处理器)Tianmouc. 受人类视觉系统工作方式的启发,它将快速但不精确的感知(例如人类周边视觉的感知)与处理速度较慢的较高分辨率感知相结合。 这样,该芯片还可以用作事件相机,它不是处理全帧,而是处理连续的电脉冲流(事件或 尖峰) 在每个光传感器检测到足够的光线变化时记录下来。“Tianmouc 拥有一系列混合像素:一些像素精度较低,但检测速度快,基于事件,可以快速响应变化而不需要太多细节;另一些像素处理速度较慢,可以准确可视化场景,”研究人员解释道。该芯片已在多种场景中进行了测试,例如突然被耀眼的灯光照亮的黑暗隧道或行人穿过的道路。 伊姆塞大学研究教授、最高分辨率商业活动摄像机负责人 […]
机器人“第三拇指”让单手完成任务成为可能;或将改变残疾人的生活

十个数字已经为我们服务了数百万年,剑桥大学的科学家们问道:这足够了吗? 这 大学研究人员由 MRC 认知与脑科学部教授 Tamar Makin 领导的研究小组相信我们可以做得更多,并与 Dani Clode 合作创造了“第三拇指”。 这种可控制的假肢,即第三拇指,安装在右手上,使佩戴者能够完成一系列单手任务,如抓取物体、打开瓶子、整理卡片,甚至剥香蕉。 “第三拇指”:重新定义人类能力 但真的需要“第三根拇指”吗?这种可穿戴技术对残疾人士来说尤其有前景。它使他们能够独立处理复杂的任务,无需依赖他人帮助。 马金教授认为,技术正在重新定义人类的意义。随着机器无缝融入我们的生活,人类与技术之间的界限变得模糊,并可能延伸到我们的思想和身体。 马金补充道:“这些技术开辟了令人兴奋的新机遇,可以造福社会,但至关重要的是,我们要考虑如何平等地帮助所有人,特别是那些经常被排除在创新研究和开发之外的边缘化群体。”
新游戏《Astro Bot》将于9月6日发售,PS5 DualSense最佳显示游戏
新游戏《Space Robot》将于9月发售,小机器人的PS太空冒险(图片来源:PlayStation) 在5月31日上午发布的最新State of Play介绍中,其Team Asobi团队开发的可爱冒险类《Astro》系列最新作品《Astro Bot》将于9月6日在PS5上推出,展开最新的可爱冒险。 《太空机器人游戏室》在 PS5 上发售后,开发团队收到了很多暖心留言,称赞游戏很好玩,有的提到使用 DualSense 无线控制器的游玩方式很有趣,有的则表达了对游戏的赞赏。作为向 PlayStation 25 周年致敬的一种方式,如今 Astro 带着史上最大的太空冒险回来了。 《太空机器人》的精彩战斗冒险(图片来源:PlayStation) 在这款新游戏中,玩家可以探索 6 个星系和 80 多个关卡,寻找 Astro 分散的船员。驾驶您的双速飞行器,潜入每个独特的星球,那里有茂密的丛林、沙滩、炙热的火山,以及其他令人惊叹的地点,如巨大的沙漏或歌唱树的树冠! Astro 可以使用超过 15 种新能力来完成任务。Astro 可以如你所愿地充分利用 DualSense 控制器、触觉反馈和自适应扳机的功能,让你深刻感受旅程的每一步。除了新能力外,还增加了 70 多种新敌人,包括每个星系的最终 Boss。值得一提的是,预告片中出现的致命眼镜蛇“费普马拉夫人”正在黄金巢穴中等着你。击败 Boss 将会揭开一个等待玩家发现的惊人秘密。 《Astro Bot》将于 9 月 6 日登陆 PS5,预购预计于 6 月 7 日开启。 “太空机器人”是不可或缺的 PS 游戏彩蛋(来源:PlayStation) 了解最新技术新闻和网上购物优惠,并在所有主要社交平台上关注雅虎科技! 🎉📱科技 Facebook:https://www.facebook.com/yahootechhk 🎉📱科技 […]
机器狗学会用腿开门

机器学习模型研究出如何让这个机器人用三条腿保持稳定,同时用一条腿开门 Philip Arm、Mayank Mittal、Hendrik Kolvenbach 和 Marco Hutter/机器人系统实验室 机器狗可以用一条腿开门、按按钮、拿起背包,同时用另外三条腿保持平衡。 像波士顿动力公司病毒式视频中的明星 Spot 这样的四足机器人,通常需要在身体上连接一只手臂来开门或拾起物体,但这会增加机器人的重量,使机器人更难挤过狭窄的空间。 菲利普·阿姆 瑞士苏黎世联邦理工学院的研究人员和他的同事使用机器学习模型来教一只现成的机器狗用一条腿执行任务,同时静止站立或用另外三条腿移动。 “我们不能用腿做所有用手臂能做的事情——现在,手要灵活得多。但关键是要让它适用于可能存在质量限制的应用,或者我们不想增加复杂性,比如太空探索,这种机器人的每一公斤都很重要,”阿姆说。 为了训练这只狗(ANYbotics 制造的 ANYmal 机器人),阿姆和他的团队为机器学习模型设定了一个目标,即用机器人的一条腿找到空间中的特定点。然后,该模型自行计算出如何控制其余三条腿,并在站立或行走时保持机器人的平衡。 然后,阿姆和他的团队可以远程控制机器人执行诸如拿起背包并将其放入盒子或收集石头等动作。虽然机器人目前只能在由人操作的情况下执行这些任务,但阿姆希望未来的改进将使这只狗能够用腿自主操纵物体。 主题: 1716952662 #机器狗学会用腿开门 2024-02-23 12:00:17
科技巨头拥抱人形机器人

四月份,北京的一个博览会上,参观者正在参观中国科技初创公司宇树机器人公司的人形机器人。 [Photo provided to China Daily] 在一个已经习惯了特斯拉 Optimus 和波士顿动力公司 Atlas 等引人注目的创新产品的市场中,全球人形机器人行业最近被中国初创公司 Unitree Robotics 的一款新产品所震惊。 其出人意料的低价是其与众不同之处:最新款 G1 人形机器人售价仅为 9.9 万元(13,700 美元)。该公司表示,虽然其他公司的很多机器人售价在 15 万至 20 万元,甚至高达数百万元,但宇树机器人在价格和性能方面都定位为非常强大的竞争对手。 去年,埃隆·马斯克曾表示,特斯拉 Optimus 的售价将在 20,000 美元左右,并声称只有在这个价位,这种机器人才能在现实世界中得到广泛应用。 美国芯片巨头英伟达首席执行官黄仁勋近日在接受采访时表示,未来人形机器人的成本可能在1万至2万美元之间。 据宇树机器人介绍,G1高约127厘米,具有出色的稳定性和灵活性,例如车身可旋转180度,还能“徒手”掰碎核桃。 尽管与该公司去年推出的配备激光雷达的 1.8 米高、47 公斤重的人形机器人 Unitree H1 相比,G1 的体型较小,但它还配备了先进的技术,包括激光雷达、深度摄像头和灵巧的手。Unitree Robotics 表示,在自主开发的大型语言模型 UnifoLM 的驱动下,G1 拥有强大的运动能力和智能学习能力,可以精确地操纵物体。 宇树机器人之所以能提供如此低的价格,得益于其多年研发四足机器人的经验,以及自主研发的电驱动技术。 “G1关节单元的核心部件,包括伺服电机、减速器、控制器等,都是宇树自主研发和生产的。”宇树机器人市场部负责人王其新介绍说。 G1从立项到上市大概用了三个月的时间,是H1的一半,这主要得益于宇树机器人的自主研发技术。不过,王先生也承认,体积的缩小也有助于降低价格。 在人工智能技术进步的推动下,越来越多的中国公司竞相进入这一新兴领域,像宇树G1这样的人形机器人成为当今智能机器人行业最热门的话题。 1716950610 2024-05-29 01:26:00 #科技巨头拥抱人形机器人
类似蜥蜴的机器人利用受昆虫启发的被动抓手爬墙
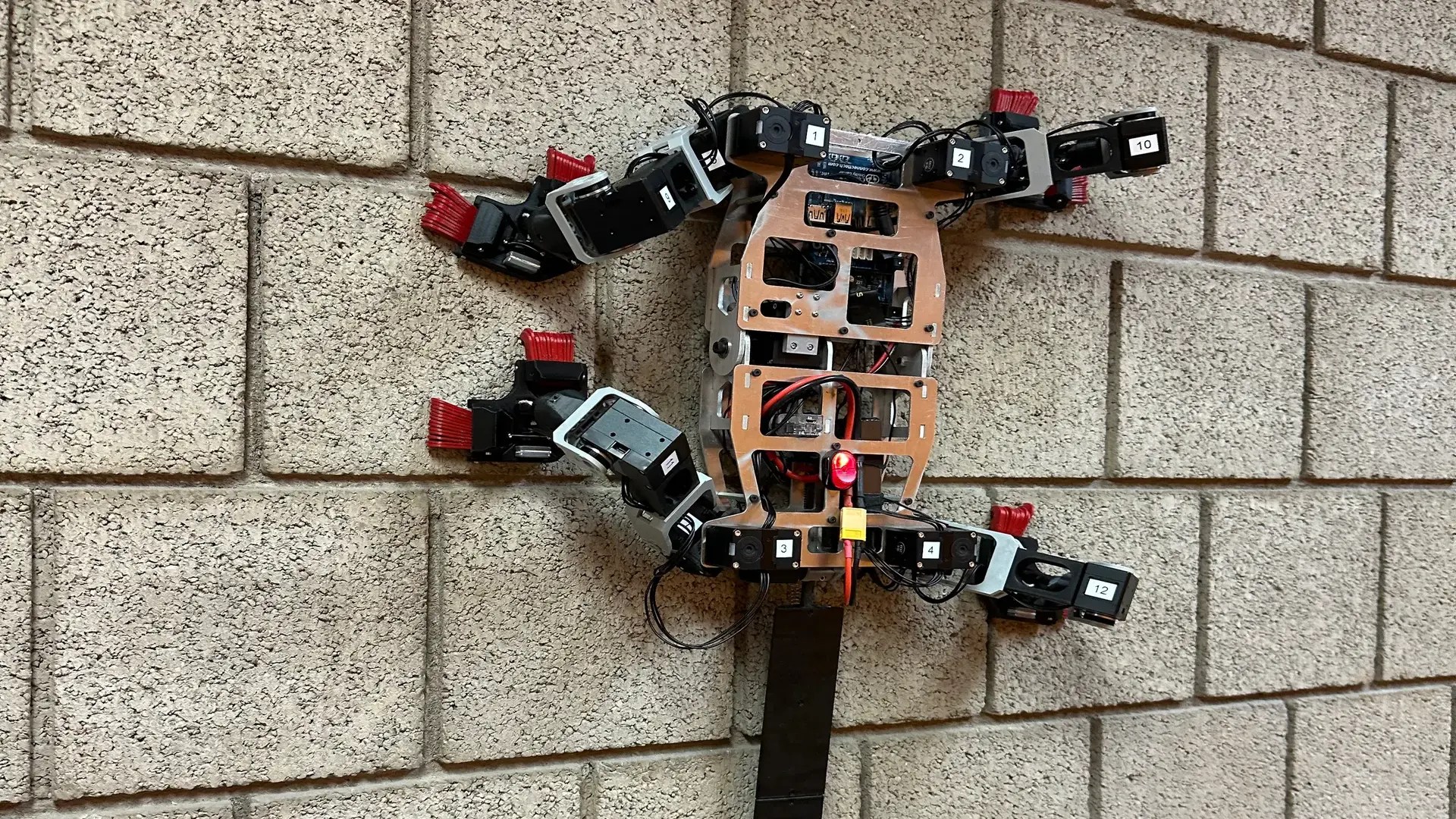
卡内基梅隆大学 (CMU) 的研究人员开发出了一种机器人,它利用仿生抓手来攀爬岩石等棘手的表面。 CMU 团队的设计提供了完全被动的抓手和腕关节,可以实现安全抓握,同时降低重量和复杂性。结合基于优化的控制策略,该系统可以在机器人的抓手之间分配力,以最大限度地降低意外脱离的风险。 据研究人员介绍,这种四足仿生机器人原型已经证明,它可以在地球重力环境下在粗糙的岩石表面和水平的煤渣砌块墙壁上垂直攀爬。 球队的详细信息 研究 发表在该大学机器人研究所的网站上。 先进的微棘夹持技术 攀爬机器人可以探测具有科学价值的地点,而传统的探测车由于地形陡峭而无法到达这些地点。 尽管某些实验机器人针对光滑表面采用了基于吸力的抓取系统,但这种技术对于无法建立密封的岩石等粗糙表面无效。 配备微棘爪的机器人非常适合攀爬岩石峭壁。这些爪子在被抬起进行下一步时会松开钩子。虽然被动式微棘爪依靠机器人的重量进行抓握,但它们在平坦的表面上表现出色,但在凹凸不平的悬崖上却面临挑战,需要采用不同的攀爬策略。 为了克服抓握岩石等粗糙表面的挑战,主动微刺夹持器利用电动执行器将钩子嵌入表面,确保在各个方向上实现电动抓握。 据研究人员介绍,尽管这些抓手非常有效,但它们通常体积庞大、耗能大、机械结构复杂,导致攀爬速度较慢。 这促使卡内基梅隆大学团队设计了轻型不规则斜坡观测机器人 (LORIS),可以解决非结构化的陡峭和垂直地形。 开创性的攀爬技术 卡内基梅隆大学团队在 LORIS 四条腿的末端安装了张开的微棘抓手。该机器人还采用了被动腕关节,使抓手能够对腿部运动做出反应。 通过机载深度感应和微处理器,它可以策略性地移动它的腿,使得相对腿上的抓握器同时固定攀爬表面,使用一种受昆虫启发的攀爬策略,称为定向内抓握(DIG)。 在煤渣块、气泡状玄武岩和矿渣上测试了 LORIS 机器人的垂直攀爬能力。机器人在每个表面尝试攀爬 10 次,直到到达顶部或掉落。 LORIS 机器人原型攀爬煤渣块、气孔状玄武岩、矿渣和石灰华表面。 在煤渣砖上进行的试验表明,采用 DIG 策略后,步骤失败率从 6.4% 降低到 2.3%,并且机器人在 10 次试验中爬上 1 米高的墙壁的次数为 6 次,而未采用 DIG 力时只有 10 次成功。 研究人员声称,LORIS 是第一个“利用微棘产生 DIG 力的四足机器人,其重量为 7 磅(3.2 公斤),是第一个在地球重力环境下在垂直不规则岩壁上进行自由攀爬的同等大小的机器人”。 虽然 LORIS 可以应对各种地形,但其目前的可靠性不足以满足实际使用,因为一次跌落就可能造成灾难性的后果。据研究人员称,大多数煤渣砖试验失败都是由于一个抓手失去抓力。 […]