
研究发现,人们并不难适应多出来的拇指

图片展示了佩戴者视角下的第三拇指设计。来源:Dani Clode Design & The Plasticity Lab 剑桥大学的研究人员已经证明,公众可以很容易地学会使用第三个拇指(可控制的假肢额外拇指)来拾取和操纵物体。 该团队在各种各样的参与者身上测试了该机器人设备,他们表示,这对于确保新技术具有包容性并能为每个人服务至关重要。 结果 发布在 科学机器人。 未来技术的一个新兴领域是运动增强——使用外骨骼或额外的机器人身体部位等机动可穿戴设备来提升我们的运动能力,超越当前的生物限制。 这些设备不仅能够改善想要提高生产力的健康人的生活质量,而且同样的技术也能为残疾人提供与环境互动的新方式。 视频显示我们的一位年轻参与者戴着儿童尺寸的第三拇指,用夹子执行“个性化”任务。图片来源:Dani Clode Design & The Plasticity Lab 剑桥大学医学研究委员会 (MRC) 认知与脑科学部的塔玛·马金 (Tamar Makin) 教授表示:“技术正在改变我们对人类的定义,机器越来越成为我们日常生活的一部分,甚至成为我们思想和身体的一部分。 “这些技术开辟了令人兴奋的新机遇,可以造福社会,但至关重要的是,我们要考虑如何平等地帮助所有人,特别是那些经常被排除在创新研究和开发之外的边缘化群体。 “为了确保每个人都有机会参与并受益于这些令人兴奋的进步,我们需要在研发过程的最早阶段明确整合和衡量包容性。” 马金教授实验室的合作者达尼·克洛德 (Dani Clode) 开发了第三拇指,这是一种额外的机械拇指,旨在增加佩戴者的活动范围,增强他们的抓握能力并扩大手的承载能力。这使用户能够执行原本可能具有挑战性或不可能用一只手完成的任务,或者执行复杂的多手任务,而无需与其他人协调。 视频显示,一名参与者戴着第三拇指,用夹子执行“个性化”任务。图片来源:Dani Clode Design & The Plasticity Lab 第三拇指戴在手掌与生物拇指相反的一侧,由放置在每个大脚趾或脚下的压力传感器控制。右脚趾施加的压力将拇指拉过手,而左脚趾施加的压力将拇指向上拉向手指。拇指运动的程度与施加的压力成正比,释放压力会使其回到原来的位置。 2022 年,该团队有机会在皇家学会年度夏季科学展览会上测试第三拇指,各个年龄段的公众都可以在不同的任务中使用该设备。 在为期五天的时间里,该团队对 596 名参与者进行了测试,他们的年龄从 3 岁到 96 岁不等,人口背景也各异。其中,只有四人无法使用第三拇指,要么是因为它不适合他们的手,要么是因为他们无法用脚控制它(专为展览开发的压力传感器不适合体重过轻的儿童)。 参与者有最多一分钟的时间来熟悉该设备,在此期间,团队会解释如何执行两项任务之一。 不同用户佩戴的 Third Thumb。图片来源:Dani Clode […]
受控扩散模型可以改变图像中物体的材质属性

麻省理工学院 CSAIL 的研究人员帮助开发了一种扩散模型,该模型可以改变图像中物体的四种材料特性:粗糙度、金属度、反照率和透明度。图片来源:Alex Shipps/MIT CSAIL 麻省理工学院计算机科学与人工智能实验室 (CSAIL) 和谷歌研究中心的研究人员可能刚刚进行了数字魔法——以扩散模型的形式,可以改变图像中物体的材质属性。 该系统名为 Alchemist,允许用户改变真实图片和 AI 生成图片的四个属性:粗糙度、金属度、反照率(物体的初始基色)和透明度。作为图像到图像的扩散模型,可以输入任何照片,然后在 -1 到 1 的连续范围内调整每个属性以创建新的视觉效果。这些照片编辑功能可能会扩展到改进视频游戏中的模型、扩展 AI 在视觉效果方面的能力以及丰富机器人训练数据。 Alchemist 背后的魔力始于一个去噪扩散模型:在实践中,研究人员使用了 Stable Diffusion 1.5,这是一个文本到图像的模型,因其逼真的效果和编辑功能而备受赞誉。之前的研究基于这个流行的模型,使用户能够进行更高级别的更改,例如交换对象或改变图像的深度。相比之下,CSAIL 和 Google Research 的方法应用此模型来关注低级属性,通过独特的基于滑块的界面修改物体材料属性的更精细的细节,其性能优于其他同类产品。 虽然之前的扩散系统可以为图像变出一只兔子,但 Alchemist 可以将同一只动物变成半透明的。该系统还可以使小黄鸭呈现出金属质感,去除金鱼的金色,并使旧鞋发亮。Photoshop 等程序具有类似的功能,但此模型可以更直接地更改材料属性。例如,在广泛使用的应用程序中,修改照片的金属外观需要几个步骤。 “当你看到自己创造的图像时,结果往往与你想象的并不完全一致,”麻省理工学院电气工程与计算机科学博士生、CSAIL 附属机构、论文第一作者 Prafull Sharma 说道。 新文章 描述这项工作。“你想在编辑图片时控制它,但图像编辑器中现有的控件无法更改材质。借助 Alchemist,我们利用文本到图像模型输出的照片级真实感,并梳理出一个滑块控件,让我们可以在提供初始图片后修改特定属性。” 精确控制 “文本到图像的生成模型使日常用户能够像写句子一样轻松地生成图像。然而,控制这些模型可能具有挑战性,”卡内基梅隆大学助理教授朱俊彦 (Jun-Yan Zhu) 表示,他没有参与这篇论文。 “虽然生成花瓶很简单,但要合成具有特定材料属性(例如透明度和粗糙度)的花瓶,用户需要花费数小时尝试不同的文本提示和随机种子。这可能会令人沮丧,尤其是对于需要精确工作的专业用户而言。Alchemist 为这一挑战提供了一个实用的解决方案,它能够精确控制输入图像的材料,同时利用大规模扩散模型的数据驱动先验,从而激发未来的工作将生成模型无缝地整合到常用内容创建软件的现有界面中,”Zhu 继续说道。 Alchemist 的设计功能可以帮助调整视频游戏中不同模型的外观。在此领域应用这种扩散模型可以帮助创作者加快设计过程,细化纹理以适应关卡的游戏玩法。此外,Sharma 及其团队的项目可以帮助改变图形设计元素、视频和电影效果,以增强照片真实感并精确实现所需的材料外观。 该方法还可以改进机器人训练数据,以完成诸如操作等任务。通过向机器介绍更多纹理,它们可以更好地理解它们在现实世界中将要抓取的各种物品。Alchemist 甚至可能有助于图像分类,分析神经网络无法识别图像的物质变化的地方。 该团队的工作在忠实地编辑请求的感兴趣对象方面超越了类似的模型。例如,当用户提示不同的模型将海豚调整到最大透明度时,只有 Alchemist 实现了这一壮举,同时保持海洋背景未编辑。当研究人员使用与他们的方法相同的数据训练可比较的扩散模型 […]
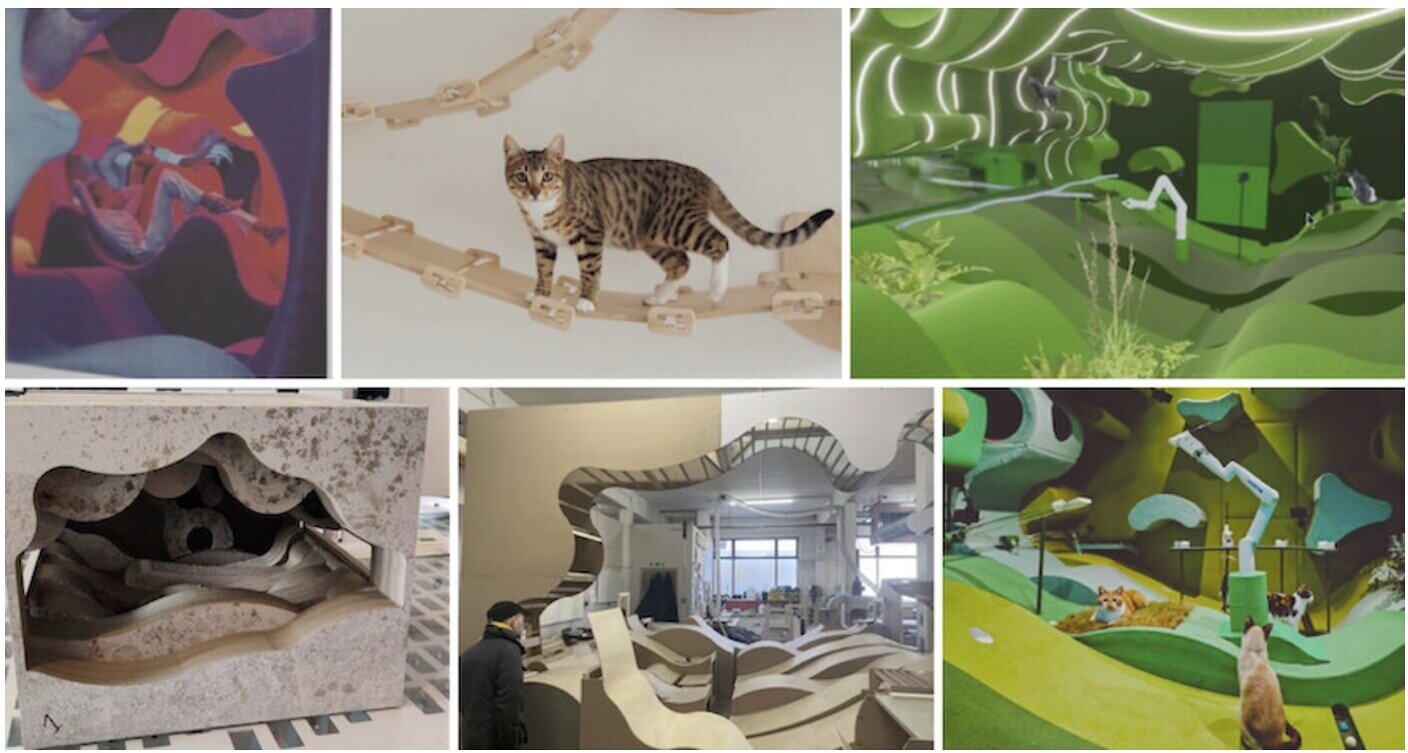
Cat 合作展示了如何才能信任机器人
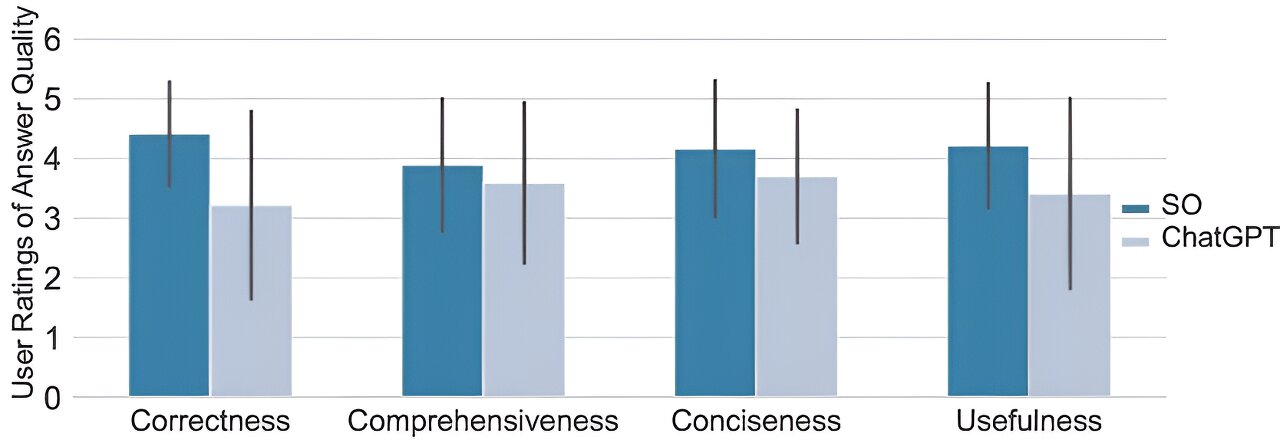
科学家发现 ChatGPT 在回答计算机编程问题时不准确
操控技术让家庭帮手机器人成为可能

Ding Zhao(中)与来自 Cyert Center 的孩子们一起与家庭助理机器人互动。图片来源:卡内基梅隆大学机械工程系 父母每年要花大约 300 个小时为孩子收拾残局。这意味着,他们几乎可以用这两周时间做其他事情。卡内基梅隆大学机械工程系的研究人员与 Google DeepMind 和华盛顿大学合作,希望父母们能重新获得整理时间,然后借助 LocoMan 来帮忙。LocoMan 是杰森一家深受喜爱的女仆“机器人罗西”的四足版本。在不久的将来,它可能会帮上父母的忙。 四足机器人设计为像狗一样用四条腿行走,它们已经在执行搜救任务、勘察建筑工地和在工厂周围移动部件。它们能够在复杂的环境中行走,重心低,重量轻,这使得四足机器人成为家庭使用的首选。到目前为止,它们缺少的是日常生活中高效工作的灵活性和多功能性。 通过在四足机器人的前腿上安装两个专门设计的轻型操纵器(类似机械臂),赵鼎创造了一个功能多样的机器人,它可以开门、倒饮料、给手机充电,也许最棒的是,它可以帮你清理蹒跚学步的孩子留下的残局。 机械工程副教授赵先生表示:“虽然许多人致力于研究看起来像人类的人形机器人,这些机器人有可能直接向人类学习,甚至在某些任务中取代人类,但我们专注于研究与人类互补、与人类合作的机器人。” 与成本高、重量重的人形机器人不同,赵教授发明的机械手可以添加到现有的低成本四足机器人中,而且结构紧凑、重量轻、易于制造,是一种易于掌握的技术。 “我们使用了四个市售的伺服器,并通过 3D 打印了一些其他部件,让它们栩栩如生,”卡内基梅隆大学安全人工智能实验室的博士生、该主题论文的共同作者林昌义解释道。 赵的团队向卡内基梅隆大学赛尔特早期教育中心的一班学龄前学生介绍了这款机器人。在向孩子们解释了机器人的工作原理和用途后,孩子们有机会与赵的机器人互动。学生们对机器人的能力印象深刻,不想让它离开教室。 该集团继续开发 LocoMan,通过将先进的感知和智能规划功能集成到现有的全身控制器中,使其能够自主执行任务。 “我们预计,像 LocoMan 这样的机器人将在未来三年内准备好在家里或托儿所帮忙,”赵说。“想象一下,我可能不再需要处理孩子们的混乱乐趣,这是一份令人愉快的工作。” 这项工作将在 2024 IEEE 机器人与自动化国际会议。 由卡内基梅隆大学机械工程系提供 引用: 操控技术让家庭帮手机器人成为可能 (2024 年 5 月 13 日) 于 2024 年 5 月 28 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1716869262 #操控技术让家庭帮手机器人成为可能 2024-05-13 21:28:03
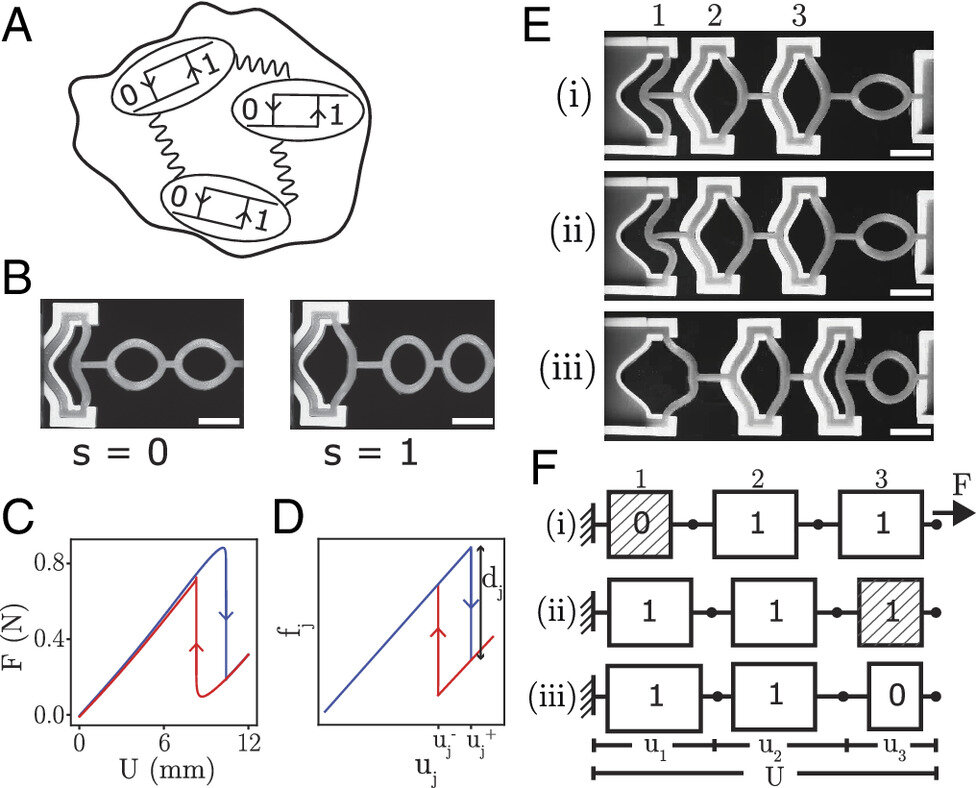
研究人员利用“智能”橡胶结构执行计算任务
瑞士幼儿园让机器人说话

Nao,nao……洛桑托儿所的瑞士儿童与他们的新机器人朋友 Nao 一起玩得很开心。 一群瑞士三岁儿童在幼儿园的地板上坐成一圈,向一个名叫 Nao 的机器人询问有关长颈鹿和西兰花的问题。 专家认为,等这些孩子长大成人后,与机器人的互动可能会像使用智能手机一样普遍。 因此洛桑的一家托儿所决定为他们提供一个良好的开端。 从新年开始,Nao 就成了瑞士联邦理工大学纳米球幼儿园的常客。他被称为“互动学习伙伴”,而不是代课老师。 当孩子们下车时,身高只有 58 厘米(不到两英尺)的 Nao 站在长凳上,与他们的视线平齐地迎接他们。 “你好,我叫 Nao。我很高兴今天能来到纳米球,”他用孩子般的尖锐声音说道。 “我不久前离开了我的星球来见你。我期待着在未来几周内认识你并能与你交谈。” 有些孩子直接走过去,有些则挥手、指指点点、触摸他的手,或者只是目不转睛地注视着他。 “不要争吵!” 洛桑 Educalis 幼儿园和小学集团总干事奥利维尔·德拉马德莱娜 (Olivier Delamadeleine) 告诉法新社:“孩子们的未来会是什么样子?他们必须与机器人一起工作吗?很有可能。” “因此,当我们处于学习阶段时,让他们尽早熟悉以便他们习惯与机器人一起工作是很重要的,”他补充道。 回到教室,伊芙·勒普拉特尼尔 (Eve L'Eplattenier) 老师和 14 个孩子围坐在地板上,Nao 坐在中间。 “他会来向你解释的,”她说。 “你喜欢西兰花吗?它对你的健康非常有益。”机器人说。 L'Eplattenier 把他抱起来放在桌子上。她说 Nao 不会像小孩子一样长高。 孩子们兴奋地聚集在一起,有的在争夺空间。 在瑞士的托儿所里,一位父亲向他的女儿介绍了一个名叫 Nao 的机器人。 “不要争吵!”Nao告诉他们。 在老师的提示下,孩子们试着用问题来抓住他的把柄,例如:“我是一只长着鼻子的动物。我是什么?”当他答对时,他们咯咯地笑了起来。 “小万事通” 机器人专业硕士生加布里埃尔·帕菲 (Gabriel Paffi) 坐在角落里,向 Nao 讲解答案。 他对机器人进行了编程并正在研究如何使其适应托儿所的需要。 帕菲说:“我们的目标是实现自动化,这样就不再需要我四处走动来照顾孩子们了。” […]
一种使蛇形机器人能够同时进行运动和操纵的方法
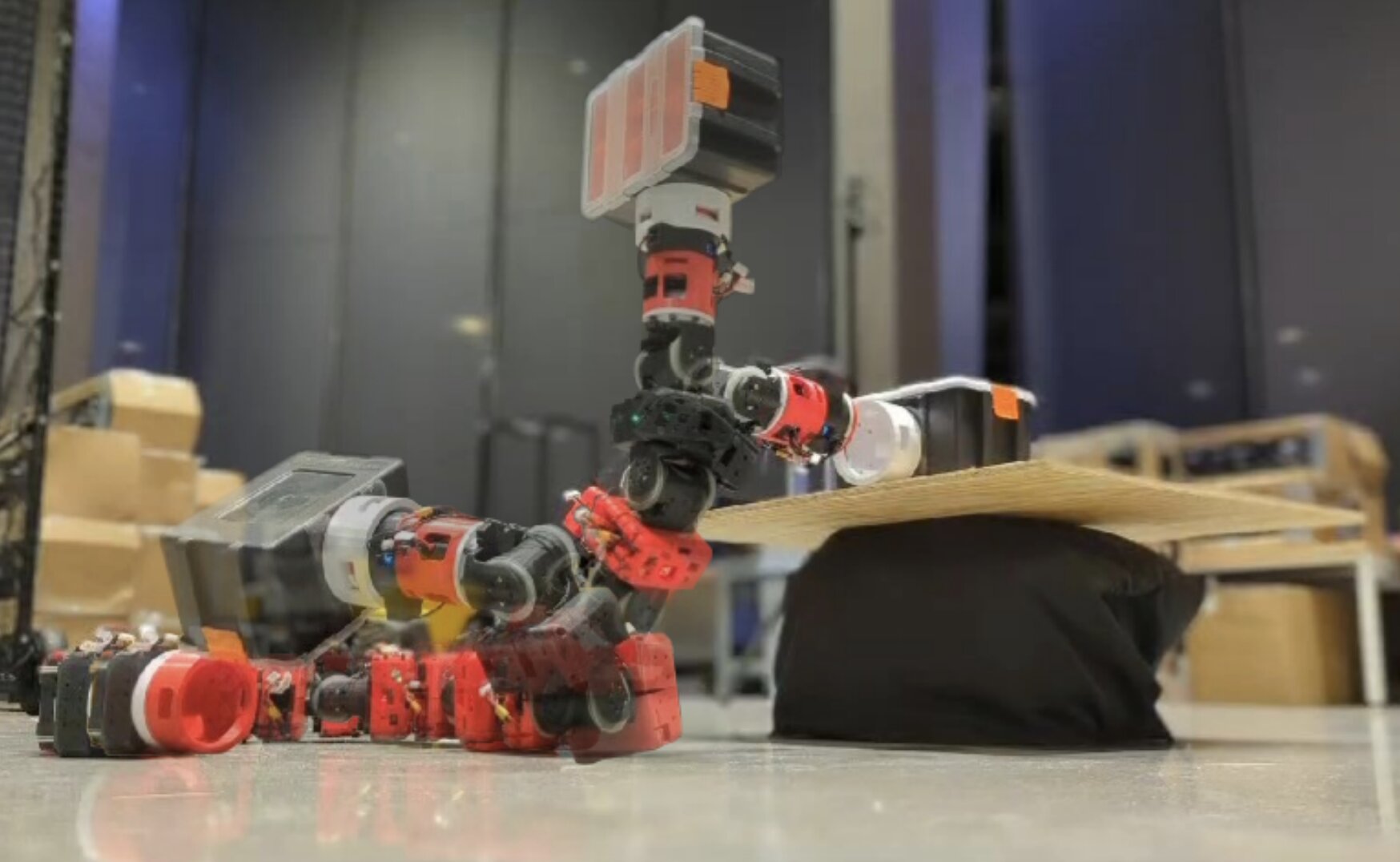
图片来源:Salagame 等人。 蛇形机器人比传统的轮式或腿式机器人具有多种优势。例如,蛇形机器人可以调整身体形状,进入狭窄空间,并在人类和其他机器人无法进入的环境中自由移动。 然而,与许多轮式和腿式机器人相比,大多数蛇形机器人无法拾取和操纵物体。这极大地限制了它们在现实世界中的应用,因为它们无法完成需要与周围环境进行更高级交互的任务。 东北大学硅突触实验室的一个研究小组在 Alireza Ramezani 教授的指导下,最近推出了一种新方法,可以让蛇形机器人同时移动和操纵物体。这种方法在一篇论文中介绍 已出版 在 论文集,最初是在 COBRA 上实现的,COBRA 是一个机器人平台,由东北大学的一组学生在 BIG Idea 竞赛中开发。 西北大学博士生 Adarsh Salagame 告诉 Tech Xplore:“我们开发蛇形机器人 COBRA 已经近三年了。这个项目最初是为了探索替代运动能力。 “与标准的轮式或腿式机器人不同,蛇形机器人通常具有多种运动能力,因为它们可以变形为不同的形状,并且可以控制身体的哪些部位与地面接触。与轮式或腿式机器人相比,这需要更精确地调节接触力,因为轮式或腿式机器人只有特定的身体部位接触地面。” 通过成功让 COBRA 机器人变形成不同的形状,Salagame 和他的同事能够拓展它的运动技能,展示出五种不同的运动方式。随后,他们还开始探索增强机器人物体操控技能的可能性。 “为了使 COBRA 机器人更加实用和灵活,将其应用范围扩大到传统机器人无法触及的领域,我们提出了物体移动操控的概念,即将移动和操控结合在一起,”Salagame 说道。“这就是我们通过 COBRA 实现的。” COBRA 机器人的头部集成了一个夹持装置,用于在特定的运动模式(即翻滚)中协助机器人。当机器人翻滚时,其头部和尾部会锁在一起形成一个轮状结构,从而使其能够以高速被动地从斜坡上滚下来。 “我们重新设计了机器人的夹爪,使其可以抓住箱子,然后将其捡起并移动到其他位置,”萨拉盖姆说。“这让我们既能灵巧地操作箱子,又能在狭窄的空间、斜坡或标准机器人无法操作的区域中移动。” 为了实现他们提出的机器人操控方法,Salagame 和他的同事开发了一种基于优化的规划器,该规划器考虑地面反作用力来规划机器人的运动和物体操控策略。在他们最近的论文中,研究人员测试了这种规划器并证明了其可行性。 “我们首先通过研究真实机器人的开环行为来测试这种方法,”萨拉盖姆说。“下一步将是在模拟中实现这个闭环,然后最终在真实机器人上实现。但这项研究向我们表明,我们的方法是可行的。我们正在解决的任务并不简单,因为当你与地面有如此多的接触时,你的关节就会产生大量的滑动和柔顺性,从而导致许多错误。” 该研究团队最近的研究证明了在蛇形机器人中同时解决运动和操纵问题的可行性。到目前为止,研究人员已经使用他们的方法研究了 COBRA 机器人与地面和箱子的相互作用。未来,Salagame 和他的合作者计划在更多用途的操纵任务上进一步测试他们的方法。 “我们在 COBRA 上添加了一个传感器套件,包括摄像头和 IMU,我们希望利用机器人的侧向运动来解决更多自主运动任务,”Salagame 补充道。“这是一个令人兴奋的新方面,在机器人中很少见。利用这种变形能力来改变机器人的惯性特性并改变翻滚的方向。 “我们还将使用摄像头来解决闭环物体操作问题,让机器人识别盒子、捡起它并将其移动到不同位置,从而有可能解决涉及高级规划的有趣任务。” 更多信息: Adarsh Salagame […]
系统从视频记录中提取口语,并将其转换为可搜索的文本

图片来源:Unsplash/CC0 公共领域 韩国的一个团队开发出了一种搜索视频内容的新方法。 系统,描述于 国际计算机视觉与机器人杂志,从视频记录中提取口语,将其转换为文本,然后使该文本可搜索。重要的是,该系统不依赖嵌入的关键字或精选标签或与视频内容相关联的主题标签。 这种方法显然依赖于与用户可能希望搜索的视频场景相关的项目的对话或口头评论。当然,如果视频已经内置了字幕,那么这是多余的。尽管如此,对于希望搜索数据库、流媒体服务和互联网其他地方的数百万小时视频的用户来说,它将是一种福音,并可用于帮助对视频进行分类。 首尔汉城大学计算机工程学院的 Kitae Hwang、In Hwan Jung 和 Jae Moon Lee 开发了一款适用于相应智能手机的 Android 应用。但值得注意的是,至少还有一款同名应用,因此如果这款应用在 Google Play 安卓应用商店中上架,可能需要改名。 这款新应用的工作原理是,使用 FFmpeg 代码从视频中提取音频,并以 10 秒为增量将其转换为文本。该团队解释说,这为视频创建了一个可搜索的时间线。然后,先进的语音识别技术会生成这些音频片段的转录,这些转录会在视频时间线上编入索引。 对于 20 分钟的视频,该过程只需两到三分钟即可完成,并在视频播放时在后台运行。该团队指出,用户可以搜索特定术语并查找视频中的所有提及内容。 该应用将应用于教育、新闻分析和其他需要快速访问特定信息的信息密集型视频。例如,查看讲座录音的学生或搜索采访中特定陈述的记者可以使用此应用。在许多其他场景中,以这种方式搜索视频会很有用。 更多信息: Kitae Hwang 等,可搜索视频播放器的实现, 国际计算机视觉与机器人杂志 (2024)。 DOI:10.1504/IJCVR.2024.138324 引用:系统从视频记录中提取口语,将其转换为可搜索的文本(2024 年 5 月 23 日)于 2024 年 5 月 25 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1716643410 #系统从视频记录中提取口语并将其转换为可搜索的文本 2024-05-23 15:36:30
机器人的触觉可能和人类一样快
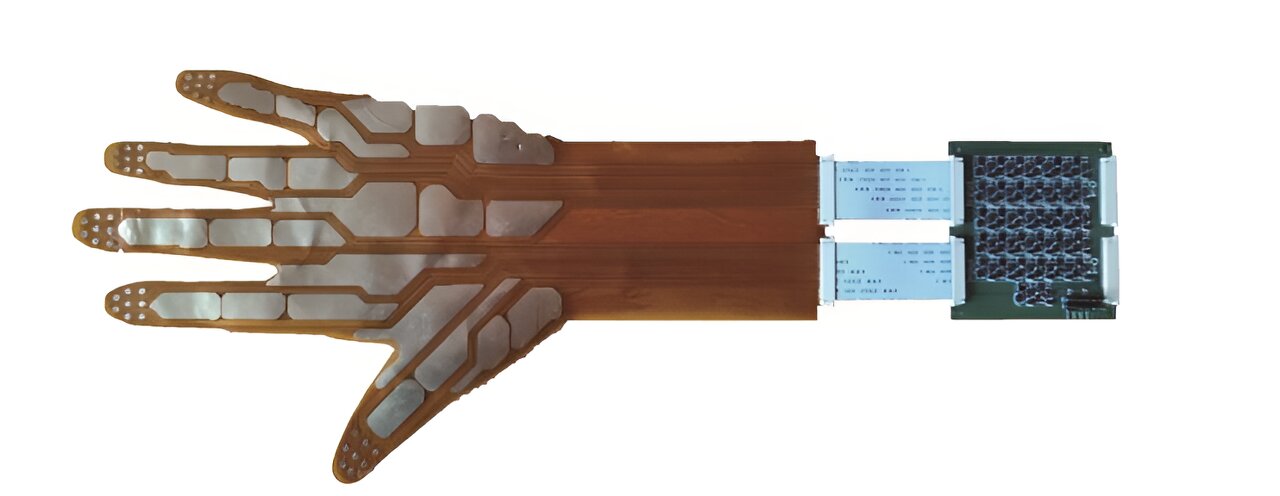
手抓分类任务中使用的 22 个物体的光学图像。来源: 科学 (2024)。DOI:10.1126/science.adf3708 “我们还在研究如何开发该系统,使其也能感受到疼痛和热量。它还应该能够感觉到手触摸的是什么材料,例如,是木头还是金属,”领导这项研究的助理教授陈立波说。 研究人员表示,借助触觉反馈,人类与机器人或假手之间的互动可以变得更安全、更自然。假手还可以像人手一样灵活地抓握物体。 “皮肤含有数百万个受体。目前的电子皮肤技术无法提供足够的受体,但这项技术使之成为可能,因此我们希望为整个机器人生产人造皮肤,”陈说。 该技术还可应用于医疗领域,例如监测帕金森病和阿尔茨海默病引起的运动功能障碍,或帮助患者恢复中风后失去的功能。 “这项技术可以进一步发展,以判断患者是否即将跌倒。然后可以利用这些信息从外部刺激肌肉以防止跌倒,或者促使辅助设备接管并防止跌倒,”张说。 更多信息: Libo Chen 等人,神经模拟触觉系统中基于脉冲时间的编码可实现动态物体分类, 科学 (2024)。 DOI: 10.1126/science.adf3708 由乌普萨拉大学提供 引用:人工触觉系统研究:机器人的触觉可能与人类一样快(2024 年 5 月 15 日)于 2024 年 5 月 25 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1716634771 #机器人的触觉可能和人类一样快 2024-05-15 14:01:03