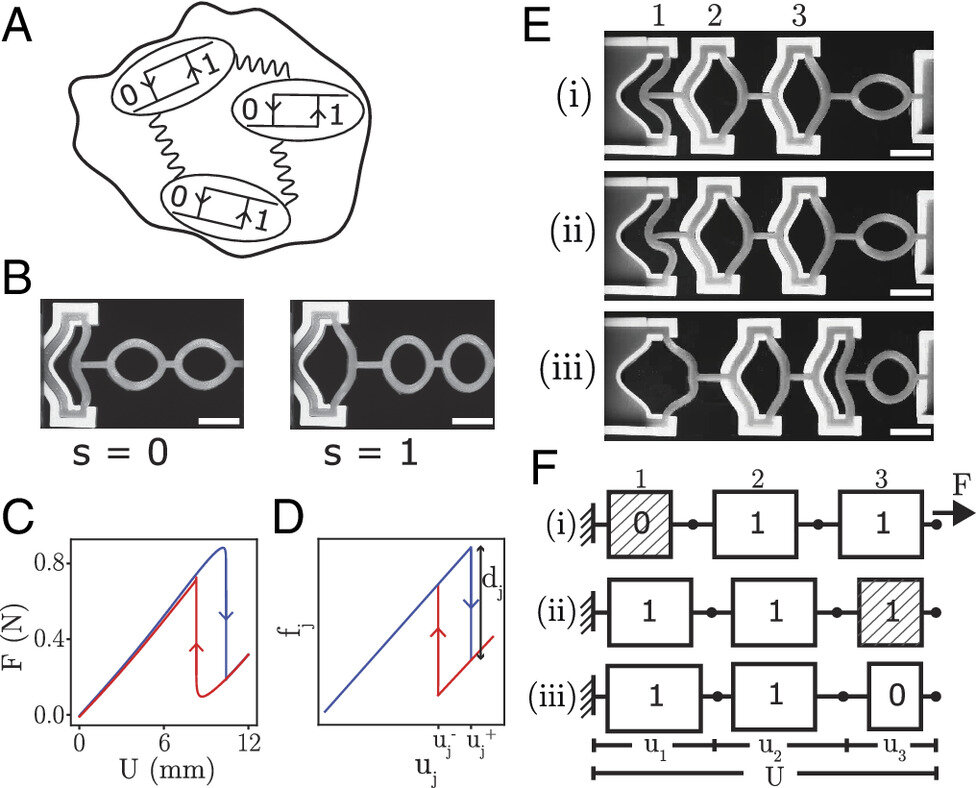
研究人员利用“智能”橡胶结构执行计算任务
瑞士幼儿园让机器人说话

Nao,nao……洛桑托儿所的瑞士儿童与他们的新机器人朋友 Nao 一起玩得很开心。 一群瑞士三岁儿童在幼儿园的地板上坐成一圈,向一个名叫 Nao 的机器人询问有关长颈鹿和西兰花的问题。 专家认为,等这些孩子长大成人后,与机器人的互动可能会像使用智能手机一样普遍。 因此洛桑的一家托儿所决定为他们提供一个良好的开端。 从新年开始,Nao 就成了瑞士联邦理工大学纳米球幼儿园的常客。他被称为“互动学习伙伴”,而不是代课老师。 当孩子们下车时,身高只有 58 厘米(不到两英尺)的 Nao 站在长凳上,与他们的视线平齐地迎接他们。 “你好,我叫 Nao。我很高兴今天能来到纳米球,”他用孩子般的尖锐声音说道。 “我不久前离开了我的星球来见你。我期待着在未来几周内认识你并能与你交谈。” 有些孩子直接走过去,有些则挥手、指指点点、触摸他的手,或者只是目不转睛地注视着他。 “不要争吵!” 洛桑 Educalis 幼儿园和小学集团总干事奥利维尔·德拉马德莱娜 (Olivier Delamadeleine) 告诉法新社:“孩子们的未来会是什么样子?他们必须与机器人一起工作吗?很有可能。” “因此,当我们处于学习阶段时,让他们尽早熟悉以便他们习惯与机器人一起工作是很重要的,”他补充道。 回到教室,伊芙·勒普拉特尼尔 (Eve L'Eplattenier) 老师和 14 个孩子围坐在地板上,Nao 坐在中间。 “他会来向你解释的,”她说。 “你喜欢西兰花吗?它对你的健康非常有益。”机器人说。 L'Eplattenier 把他抱起来放在桌子上。她说 Nao 不会像小孩子一样长高。 孩子们兴奋地聚集在一起,有的在争夺空间。 在瑞士的托儿所里,一位父亲向他的女儿介绍了一个名叫 Nao 的机器人。 “不要争吵!”Nao告诉他们。 在老师的提示下,孩子们试着用问题来抓住他的把柄,例如:“我是一只长着鼻子的动物。我是什么?”当他答对时,他们咯咯地笑了起来。 “小万事通” 机器人专业硕士生加布里埃尔·帕菲 (Gabriel Paffi) 坐在角落里,向 Nao 讲解答案。 他对机器人进行了编程并正在研究如何使其适应托儿所的需要。 帕菲说:“我们的目标是实现自动化,这样就不再需要我四处走动来照顾孩子们了。” […]
一种使蛇形机器人能够同时进行运动和操纵的方法
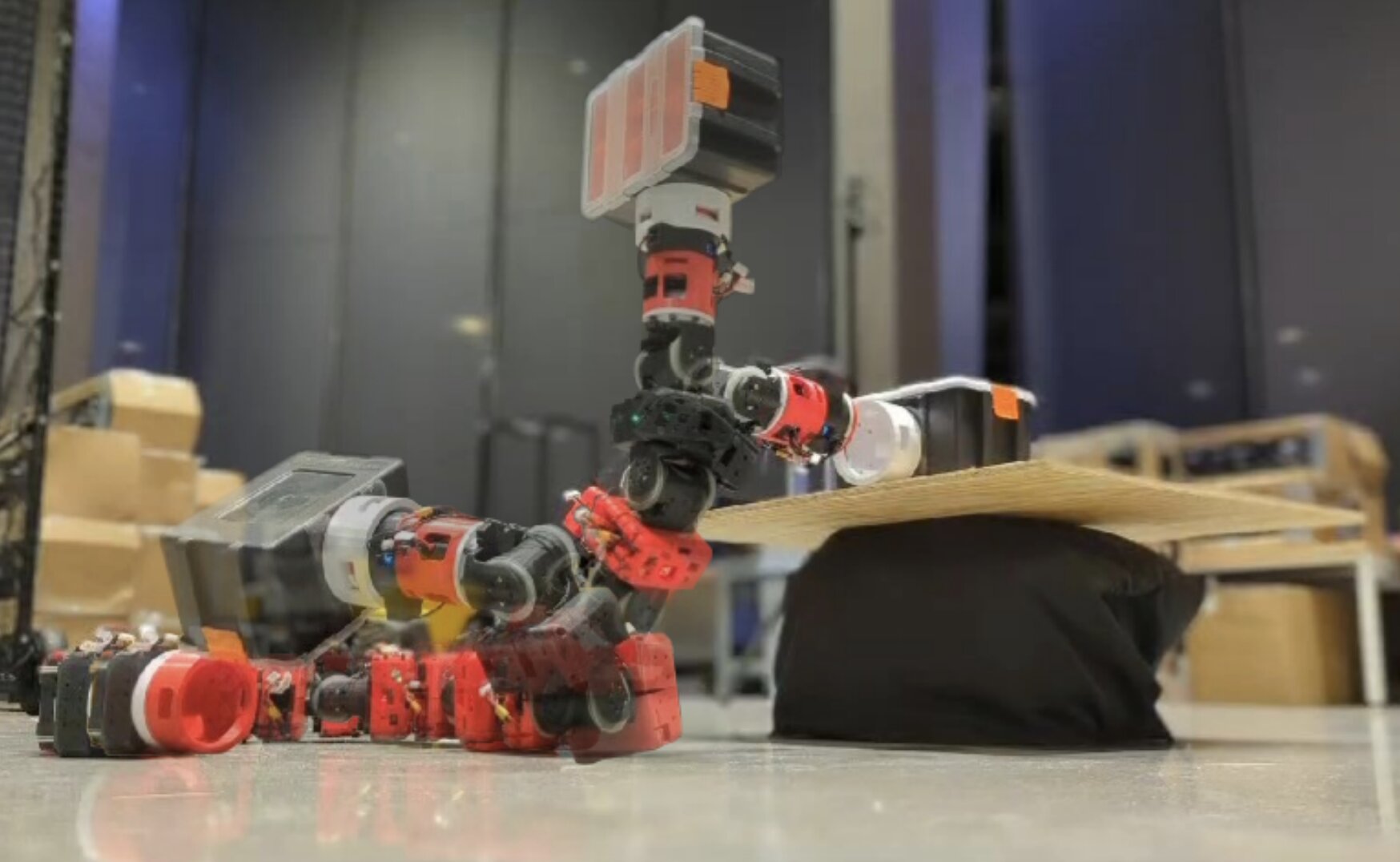
图片来源:Salagame 等人。 蛇形机器人比传统的轮式或腿式机器人具有多种优势。例如,蛇形机器人可以调整身体形状,进入狭窄空间,并在人类和其他机器人无法进入的环境中自由移动。 然而,与许多轮式和腿式机器人相比,大多数蛇形机器人无法拾取和操纵物体。这极大地限制了它们在现实世界中的应用,因为它们无法完成需要与周围环境进行更高级交互的任务。 东北大学硅突触实验室的一个研究小组在 Alireza Ramezani 教授的指导下,最近推出了一种新方法,可以让蛇形机器人同时移动和操纵物体。这种方法在一篇论文中介绍 已出版 在 论文集,最初是在 COBRA 上实现的,COBRA 是一个机器人平台,由东北大学的一组学生在 BIG Idea 竞赛中开发。 西北大学博士生 Adarsh Salagame 告诉 Tech Xplore:“我们开发蛇形机器人 COBRA 已经近三年了。这个项目最初是为了探索替代运动能力。 “与标准的轮式或腿式机器人不同,蛇形机器人通常具有多种运动能力,因为它们可以变形为不同的形状,并且可以控制身体的哪些部位与地面接触。与轮式或腿式机器人相比,这需要更精确地调节接触力,因为轮式或腿式机器人只有特定的身体部位接触地面。” 通过成功让 COBRA 机器人变形成不同的形状,Salagame 和他的同事能够拓展它的运动技能,展示出五种不同的运动方式。随后,他们还开始探索增强机器人物体操控技能的可能性。 “为了使 COBRA 机器人更加实用和灵活,将其应用范围扩大到传统机器人无法触及的领域,我们提出了物体移动操控的概念,即将移动和操控结合在一起,”Salagame 说道。“这就是我们通过 COBRA 实现的。” COBRA 机器人的头部集成了一个夹持装置,用于在特定的运动模式(即翻滚)中协助机器人。当机器人翻滚时,其头部和尾部会锁在一起形成一个轮状结构,从而使其能够以高速被动地从斜坡上滚下来。 “我们重新设计了机器人的夹爪,使其可以抓住箱子,然后将其捡起并移动到其他位置,”萨拉盖姆说。“这让我们既能灵巧地操作箱子,又能在狭窄的空间、斜坡或标准机器人无法操作的区域中移动。” 为了实现他们提出的机器人操控方法,Salagame 和他的同事开发了一种基于优化的规划器,该规划器考虑地面反作用力来规划机器人的运动和物体操控策略。在他们最近的论文中,研究人员测试了这种规划器并证明了其可行性。 “我们首先通过研究真实机器人的开环行为来测试这种方法,”萨拉盖姆说。“下一步将是在模拟中实现这个闭环,然后最终在真实机器人上实现。但这项研究向我们表明,我们的方法是可行的。我们正在解决的任务并不简单,因为当你与地面有如此多的接触时,你的关节就会产生大量的滑动和柔顺性,从而导致许多错误。” 该研究团队最近的研究证明了在蛇形机器人中同时解决运动和操纵问题的可行性。到目前为止,研究人员已经使用他们的方法研究了 COBRA 机器人与地面和箱子的相互作用。未来,Salagame 和他的合作者计划在更多用途的操纵任务上进一步测试他们的方法。 “我们在 COBRA 上添加了一个传感器套件,包括摄像头和 IMU,我们希望利用机器人的侧向运动来解决更多自主运动任务,”Salagame 补充道。“这是一个令人兴奋的新方面,在机器人中很少见。利用这种变形能力来改变机器人的惯性特性并改变翻滚的方向。 “我们还将使用摄像头来解决闭环物体操作问题,让机器人识别盒子、捡起它并将其移动到不同位置,从而有可能解决涉及高级规划的有趣任务。” 更多信息: Adarsh Salagame […]
系统从视频记录中提取口语,并将其转换为可搜索的文本

图片来源:Unsplash/CC0 公共领域 韩国的一个团队开发出了一种搜索视频内容的新方法。 系统,描述于 国际计算机视觉与机器人杂志,从视频记录中提取口语,将其转换为文本,然后使该文本可搜索。重要的是,该系统不依赖嵌入的关键字或精选标签或与视频内容相关联的主题标签。 这种方法显然依赖于与用户可能希望搜索的视频场景相关的项目的对话或口头评论。当然,如果视频已经内置了字幕,那么这是多余的。尽管如此,对于希望搜索数据库、流媒体服务和互联网其他地方的数百万小时视频的用户来说,它将是一种福音,并可用于帮助对视频进行分类。 首尔汉城大学计算机工程学院的 Kitae Hwang、In Hwan Jung 和 Jae Moon Lee 开发了一款适用于相应智能手机的 Android 应用。但值得注意的是,至少还有一款同名应用,因此如果这款应用在 Google Play 安卓应用商店中上架,可能需要改名。 这款新应用的工作原理是,使用 FFmpeg 代码从视频中提取音频,并以 10 秒为增量将其转换为文本。该团队解释说,这为视频创建了一个可搜索的时间线。然后,先进的语音识别技术会生成这些音频片段的转录,这些转录会在视频时间线上编入索引。 对于 20 分钟的视频,该过程只需两到三分钟即可完成,并在视频播放时在后台运行。该团队指出,用户可以搜索特定术语并查找视频中的所有提及内容。 该应用将应用于教育、新闻分析和其他需要快速访问特定信息的信息密集型视频。例如,查看讲座录音的学生或搜索采访中特定陈述的记者可以使用此应用。在许多其他场景中,以这种方式搜索视频会很有用。 更多信息: Kitae Hwang 等,可搜索视频播放器的实现, 国际计算机视觉与机器人杂志 (2024)。 DOI:10.1504/IJCVR.2024.138324 引用:系统从视频记录中提取口语,将其转换为可搜索的文本(2024 年 5 月 23 日)于 2024 年 5 月 25 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1716643410 #系统从视频记录中提取口语并将其转换为可搜索的文本 2024-05-23 15:36:30
机器人的触觉可能和人类一样快
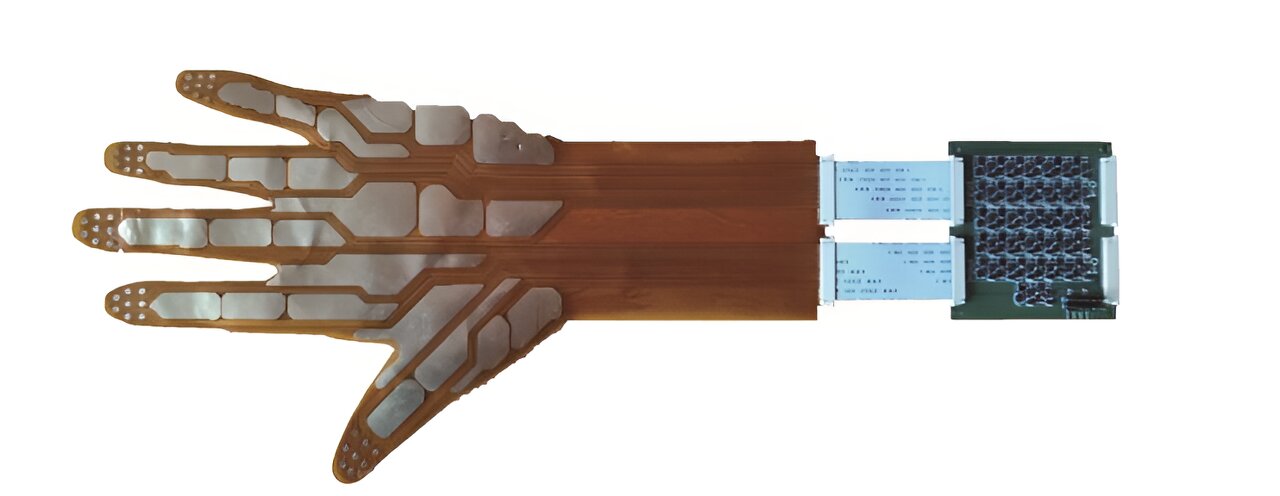
手抓分类任务中使用的 22 个物体的光学图像。来源: 科学 (2024)。DOI:10.1126/science.adf3708 “我们还在研究如何开发该系统,使其也能感受到疼痛和热量。它还应该能够感觉到手触摸的是什么材料,例如,是木头还是金属,”领导这项研究的助理教授陈立波说。 研究人员表示,借助触觉反馈,人类与机器人或假手之间的互动可以变得更安全、更自然。假手还可以像人手一样灵活地抓握物体。 “皮肤含有数百万个受体。目前的电子皮肤技术无法提供足够的受体,但这项技术使之成为可能,因此我们希望为整个机器人生产人造皮肤,”陈说。 该技术还可应用于医疗领域,例如监测帕金森病和阿尔茨海默病引起的运动功能障碍,或帮助患者恢复中风后失去的功能。 “这项技术可以进一步发展,以判断患者是否即将跌倒。然后可以利用这些信息从外部刺激肌肉以防止跌倒,或者促使辅助设备接管并防止跌倒,”张说。 更多信息: Libo Chen 等人,神经模拟触觉系统中基于脉冲时间的编码可实现动态物体分类, 科学 (2024)。 DOI: 10.1126/science.adf3708 由乌普萨拉大学提供 引用:人工触觉系统研究:机器人的触觉可能与人类一样快(2024 年 5 月 15 日)于 2024 年 5 月 25 日检索自 本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。 1716634771 #机器人的触觉可能和人类一样快 2024-05-15 14:01:03
研究人员确定了优化功能梯度材料性能的最佳算法
图片来源:CC0 公共领域 来自日本的一项研究 发布 在里面 国际计算机辅助工程与技术杂志 揭示了一种优化功能梯度材料 (FGM) 成分的方法。FGM 是一种先进的复合材料,其成分和性能在整个体积内逐渐变化,旨在优化特定负载条件下的性能。 这项工作可用于减轻均匀冷却的多层 FGM 板中的残余热应力,使其能够更好地应对航空航天应用和发电行业中发现的显著热循环。 山阳小野田市立大学机械工程系的 Ryoichi Chiba 使用开源框架 Optuna 中的黑盒优化 (BBO) 技术进行调查。Optuna 以用户友好型界面而闻名,非常适合复杂的优化任务。 Chiba 使用了三种 Optuna 算法:树结构 Parzen 估计器 (TPE)、协方差矩阵自适应进化策略 (CMA-ES) 和非支配排序遗传算法 II (NSGA-II)。这些算法各自提供了独特的优化方法,其中 TPE 侧重于快速收敛,而 CMA-ES 和 NSGA-II 侧重于进化策略。 FGM 的优化一直是一项艰巨的任务,因为在其设计和生产过程中存在很多变量,其中任何一个变量都可能对其性能产生显著的积极或消极影响。 Chiba 解释说,CMA-ES 算法效果最好。虽然 TPE 可以快速收敛到解决方案,但其优化质量不如 CMA-ES 和 NSGA-II 等更彻底的进化方法。这项研究表明,在尝试解释设计变量之间的相互作用时可能会出现问题,而这些问题有时会适得其反,导致优化过程更加复杂,而不是得到增强。 更多信息: Ryoichi Chiba,比较功能梯度材料设计的开源优化算法:热弹性案例研究, 国际计算机辅助工程与技术杂志 (2024)。 […]
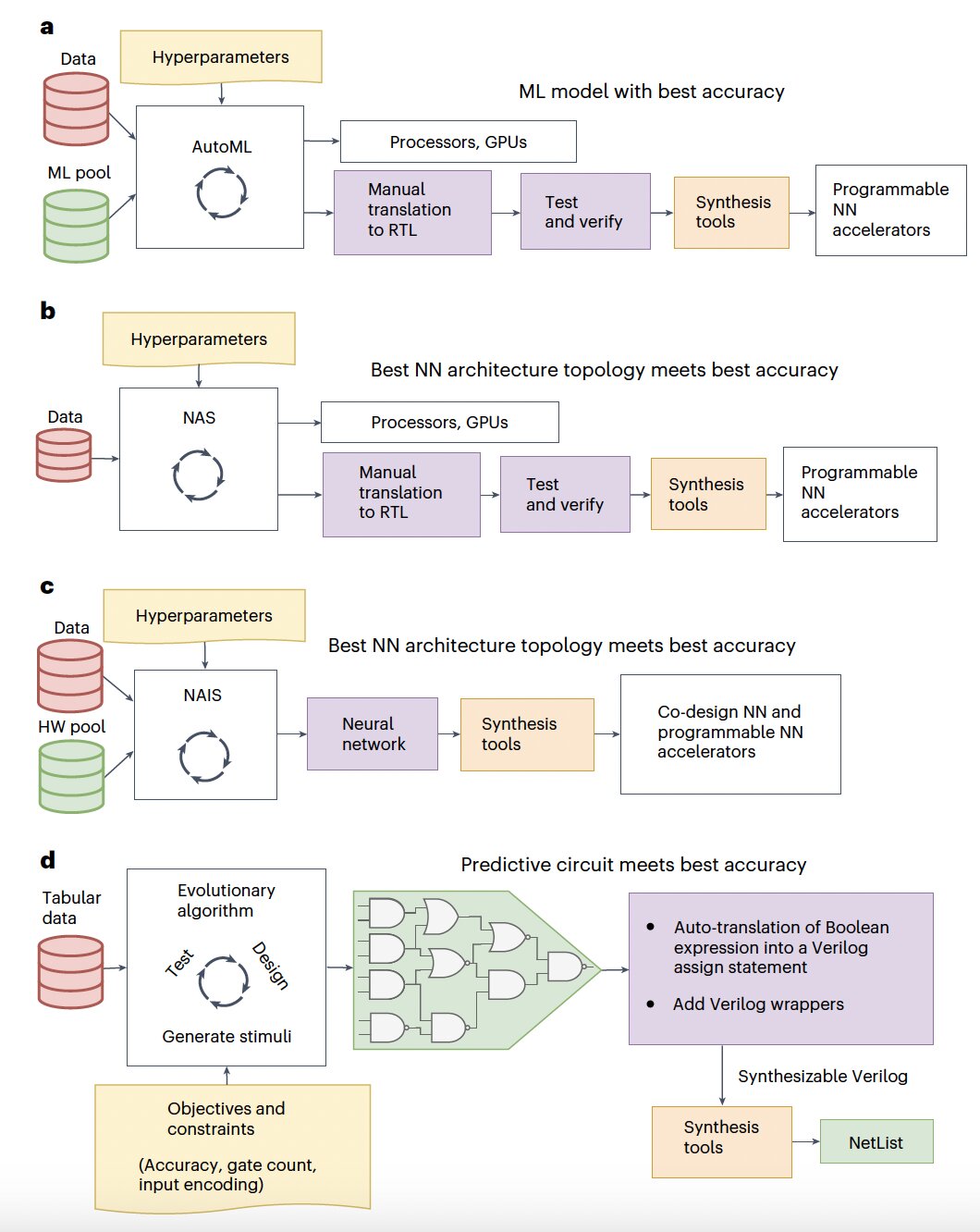
一种用于表格数据分类的预测电路生成方法