自动驾驶汽车依赖于视觉这种对人类至关重要的感觉。这不仅仅是机器能够看到(它已经做到了),还包括在几毫秒内观察、分析、辨别和处理。挑战在于在恰当的时间内实现人类的这一特性,以做出必要的决定。例如,对于机器来说,看到赛道旁边的一棵树很容易。困难的是知道这不是一个会移动或挡路的物体,而相反,如果它是行人。科学杂志 自然 本周三发布了这方面的两项进展:一种能够以最少的信息对事件做出快速反应的处理器,以及一种以更低的延迟(响应时间)提高机器视觉精度的新系统(算法)。
这些研究对于自动驾驶汽车或机器人技术的发展至关重要,并且已经在以下领域取得了进展: 微电子研究所 (Imse)位于安达卢西亚首都,由高等科学研究委员会(CSIC)和塞维利亚大学提供。三星和索尼等跨国公司已经使用该公司出售的专利 先知。
他出版的两部作品 自然 它们是基于注视点的这些系统的创新,注视点是人类的一种机制,它使我们能够在视觉聚焦的区域中最大化分辨率,同时在不相关的周边视觉区域中降低分辨率。通过这种方式,信息量减少了,但保持了在几毫秒内做出决策所必需的数据的视觉识别能力。
关键在于准确解读场景并快速检测动作,以便立即做出反应。传统相机可以捕捉一帧图像并以非常高的分辨率再现,但所有这些信息都必须经过处理和区分,这需要时间和资源投入,与自动驾驶或先进机器人所需的即时决策不相容。
进步之一 这份文件由美国宾夕法尼亚大学研究员 Daniel Gehrig 和瑞士苏黎世大学机器人学教授 Davide Scaramuzza 共同签署。两人都解决了高分辨率彩色图像决策的难题。这些图像需要大带宽才能以必要的流畅度进行处理,而降低这种高容量的代价是更大的延迟、更长的响应时间。另一种方法是使用事件相机,它可以处理连续的脉冲流,但会牺牲精度。
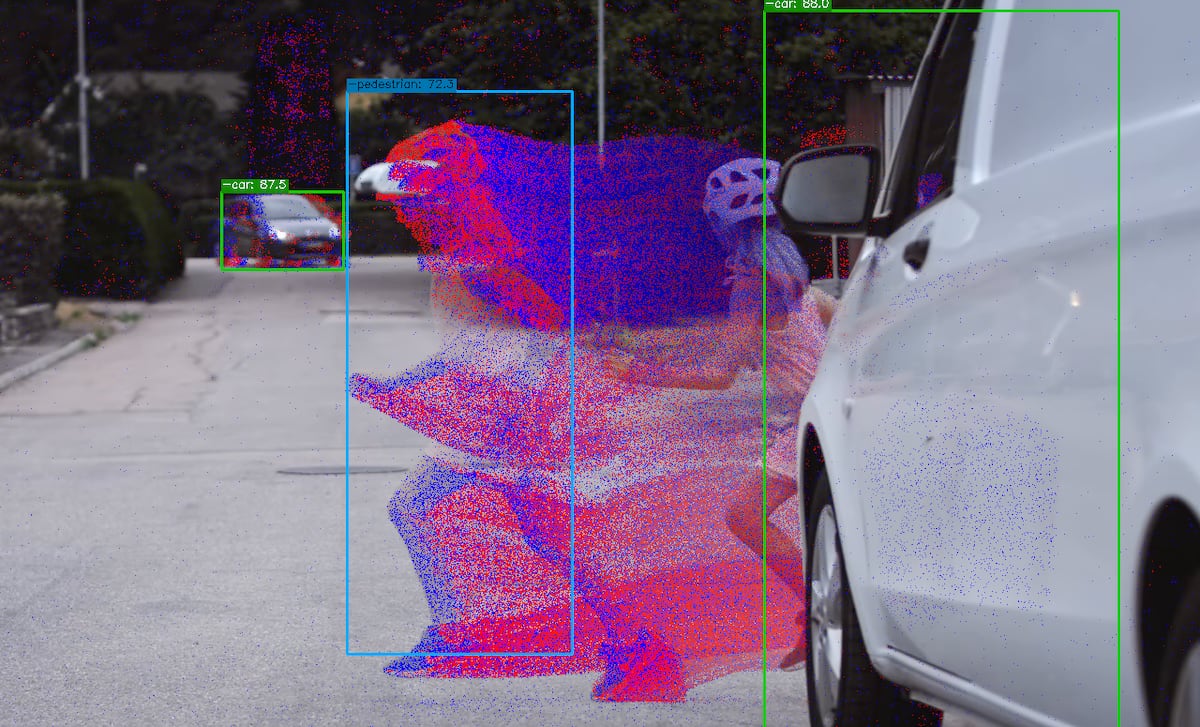
为了解决这些限制,作者开发了一种混合系统,可以实现有效的物体检测,同时将延迟降到最低。该算法结合了两个摄像头的信息:一个摄像头会降低彩色帧速率以减少所需的带宽,另一个摄像头会补偿延迟损失,从而确保可以检测到快速移动的物体,例如行人和汽车。研究人员表示:“这些结果为高效、准确的物体检测铺平了道路,尤其是在极端情况下。”
“这是一个突破。目前的驾驶辅助系统,例如 MobileEye 的系统,已内置于全球 1.4 亿多辆汽车中,采用每秒拍摄 30 帧或每 33 毫秒拍摄一张图像的标准摄像头。此外,它们至少需要三帧才能可靠地检测到行人或汽车。这使得启动制动操作的总时间缩短至 100 毫秒。我们的系统使我们能够将这个时间缩短到 1 毫秒以下,而无需使用高速摄像头,因为这将产生巨大的计算成本,”Scaramuzza 解释道。
当前系统启动制动操作的总时间增加到 100 毫秒。我们的算法允许我们将此时间缩短到 1 毫秒以下,而无需使用高速摄像机。
苏黎世大学机器人学教授 Davide Scaramuzza(瑞士)
研究人员表示,该技术已“转让给一家顶级公司”。他补充道:“如果获得批准,从概念验证到影响再到最终实施通常需要很多年。”
清华大学类脑计算研究中心 (CBICR) 主任石路平与他的团队一起开发了 芯片(处理器)Tianmouc. 受人类视觉系统工作方式的启发,它将快速但不精确的感知(例如人类周边视觉的感知)与处理速度较慢的较高分辨率感知相结合。
这样,该芯片还可以用作事件相机,它不是处理全帧,而是处理连续的电脉冲流(事件或 尖峰) 在每个光传感器检测到足够的光线变化时记录下来。“Tianmouc 拥有一系列混合像素:一些像素精度较低,但检测速度快,基于事件,可以快速响应变化而不需要太多细节;另一些像素处理速度较慢,可以准确可视化场景,”研究人员解释道。该芯片已在多种场景中进行了测试,例如突然被耀眼的灯光照亮的黑暗隧道或行人穿过的道路。
伊姆塞大学研究教授、最高分辨率商业活动摄像机负责人 Bernabé Linares 强调,Scaramuzza 使用无人机收集图像,传统方式是使用无人机,而活动摄像机则使用无人机。“进步之处在于用于识别物体的算法,结果很有趣,”他强调道。
Imse 主要从事处理器方面的工作,他指出,苏黎世大学等机构的算法开发对于芯片和机器人应用来说是必不可少的。由于这些技术非常紧凑,因此需要消耗很少能量的轻量级计算系统。“对于无人机来说,这是一个重要的发展。这种类型的事件摄像机对它们非常有用,”他强调道。
石路平的作品更接近于 神经形态系统组 Imse 的。在这种情况下,它是一个混合处理器。“计算像素交替和空间差异。存储从一个图像到下一个图像的光并计算变化。如果没有修改,差异为零。它很少从相当复杂的传感器提供数据,”Linares 解释说。
尽管 自然 旨在实现自动驾驶,视觉技术的进步对机器人技术也具有重要意义,因为机器人技术也需要能够辨别信息以高速做出决策。工业自动化流程就是这种情况。“但汽车制造商对此非常感兴趣,因为他们在寻找各种发展,因为这样更安全,他们可以充分利用每种技术,”Linares 解释说,他强调雷诺是 Prophesee 的投资者之一。
1717265009
#两项研究为无人驾驶汽车提供更人性化的视野 #技术
2024-05-29 15:00:50