
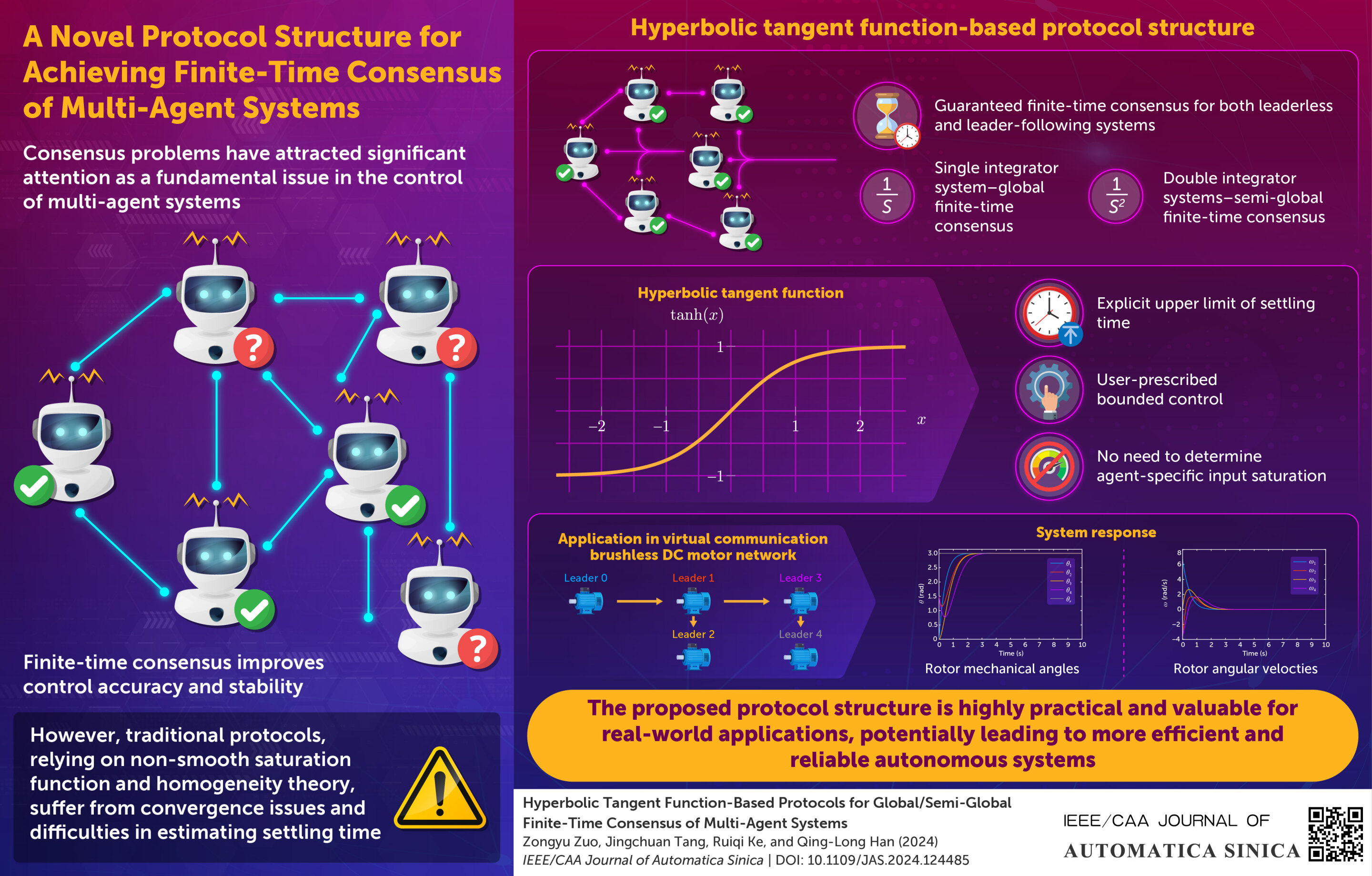
新的协议结构确保无领导和有领导跟随的多智能体系统实现全局和半全局有限时间共识,并允许计算闭环系统的稳定时间上限。图片来源:中国自动化学会
共识问题,即一组智能体(例如无人驾驶车辆、机器或机器人)只需通过它们之间的本地通信就某些变量达成一致,已作为多智能体系统协作控制的一个基本问题引起了广泛关注。简而言之,多智能体系统由多个决策智能体组成,它们在共同环境中相互交互,以根据情况实现共同或冲突的目标。
根据代理是否跟踪预定的领导者,这些问题可分为无领导者共识或领导者跟随共识。研究人员对这两类问题进行了广泛研究,并开发了共识协议。然而,大多数当前协议仅提供渐近共识。
一些应用需要在有限时间内达成精确共识或有限时间共识。达成这种共识可以提高控制精度和稳定性。在实际应用中,有限时间共识需要相当大的控制力。然而,控制力存在物理限制,如果忽略这些限制,可能会降低控制器的性能。
研究已经探索了受约束的有限时间控制方法的解决方案,但大多数方法依赖于齐次理论,其中确保一致的收敛很困难,并且确切的稳定时间很难估计。
为了解决这些问题,北京航空航天大学的左宗宇教授、谭景川先生和柯瑞琪先生以及澳大利亚斯威本科技大学的 IEEE 院士韩庆龙教授组成的研究团队开发了一种新颖的协议结构,用于实现无领导和有领导跟随的多智能体系统的全局和半全局有限时间共识。他们的研究 发布 在里面 IEEE/CAA 自动化学报。
该团队对机器人系统和人工智能的潜力非常感兴趣,它们可以改变我们的日常生活,高效且可持续地应对复杂的社会挑战。左教授直观地解释了他们的工作:“想象一下一群舞者需要表演同步的舞蹈,他们彼此之间无法直接看到对方,只能听从附近人的提示。我们的工作类似于创建一套规则,帮助这些舞者在短时间内完美同步,确保每个人即使动作速度有限,也能一起精彩表演。”
本研究中提出的协议使用双曲正切函数,而不是传统协议中使用的非平滑饱和函数。这些协议分别保证了积分器和双积分器类型系统的全局和半全局有限时间一致性。此外,它们还允许显式计算稳定时间的上限和闭环系统的用户规定的有界控制水平,这使得它们在实际应用中非常实用和有价值。
此外,与传统协议不同,双曲正切函数避免了确定每个代理的输入饱和度,从而简化了协议的设计和稳定性分析。研究人员通过单积分器和双积分器多代理系统的说明性示例并将其应用于具有多个直流电机的实际系统,证明了新协议结构的有效性。
左教授强调了这项研究的实际应用,他说:“这些协议具有广泛的应用,例如用于农业或监视任务的自主无人机队、机械臂的协调控制以及同步交通灯系统。
“最终,我们的研究可以提高自主系统的效率和可靠性。例如,更好的交通管理系统可以减少拥堵和污染,而更协调的灾难响应机器人可以在危机期间挽救生命。”
总体而言,创新的协议结构标志着共识问题领域的重大成就,从而增强了多智能体自主系统。
更多信息:
Zongyu Zuo 等,基于双曲正切函数的多智能体系统全局/半全局有限时间共识协议, IEEE/CAA自动化学报 (2024)。 DOI:10.1109/JAS.2024.124485
中国自动化学会提供
引用:研究提出了一种实现多智能体系统有限时间共识的新型协议结构(2024 年 6 月 12 日)于 2024 年 6 月 13 日检索自
本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。
1718276860
#研究提出了实现多智能体系统有限时间共识的新型协议结构
2024-06-12 20:12:43











