图片来源:劳拉·范·哈森东克
埃因霍温的研究人员开发出一种由液晶和石墨烯制成的软机器人“手”,可用于设计未来的手术机器人。这项新工作刚刚 发布 在期刊上 ACS 应用材料与界面。
在我们未来的医院里,软体机器人可能会被用作手术机器人。但在这之前,研究人员需要弄清楚如何精确控制和移动这些可变形的机器人。此外,许多当前的软体机器人都含有金属,这意味着它们在富含水的环境(如人体)中的使用相当有限。
由博士候选人 Laura van Hazendonk、Zafeiris Khalil(作为其硕士研究的一部分)、Michael Debije 和 Heiner Friedrich 领导的埃因霍温理工大学研究人员设计了一种由石墨烯和液晶(均为有机材料)制成的软机器人手或夹持器。这为未来此类设备在手术中安全使用提供了可能性。
机器人对我们的世界有着巨大的影响。例如,在工业领域,机器人制造汽车和电视。在医院,机器人(如达芬奇机器人手术系统)协助外科医生进行微创手术。有些人甚至在家里用机器人打扫卫生。
“社会已经变得依赖机器人,我们正在想出新的方法来使用它们,”化学工程和化学系博士研究员 Van Hazendonk 说道。“但在设计新的使用方法时,我们需要考虑使用不同类型的材料来制造它们。”
软思维
Van Hazendonk 提到的不同材料包括流体、凝胶和弹性材料,这些材料都很容易变形。“通常,机器人由金属制成,金属既坚硬又坚硬。但在某些应用中,由坚硬材料制成的机器人会限制机器人的性能,”Van Hazendonk 说。“解决方案是考虑柔软性。”
在软机器人技术中,目标是用流体或凝胶等材料制造机器人,这些材料可以在特定情况下变形,然后可以像用传统刚性和硬质材料制成的机器人一样行动。
软机器人有望产生重大影响的一个领域是外科手术。Van Hazendonk 补充道:“对于外科医生来说,许多手术可能既复杂又精细,因此需要外科医生拥有精准的灵活性。有时这是不可能的,他们就会求助于机器人。
“但刚性机器人可能无法轻松进入某些区域。这就是软机器人可以脱颖而出的地方,我们的目标是提供潜在的新帮手,例如用于夹紧和缝合手术中使用的设备。”
转向诺贝尔材料
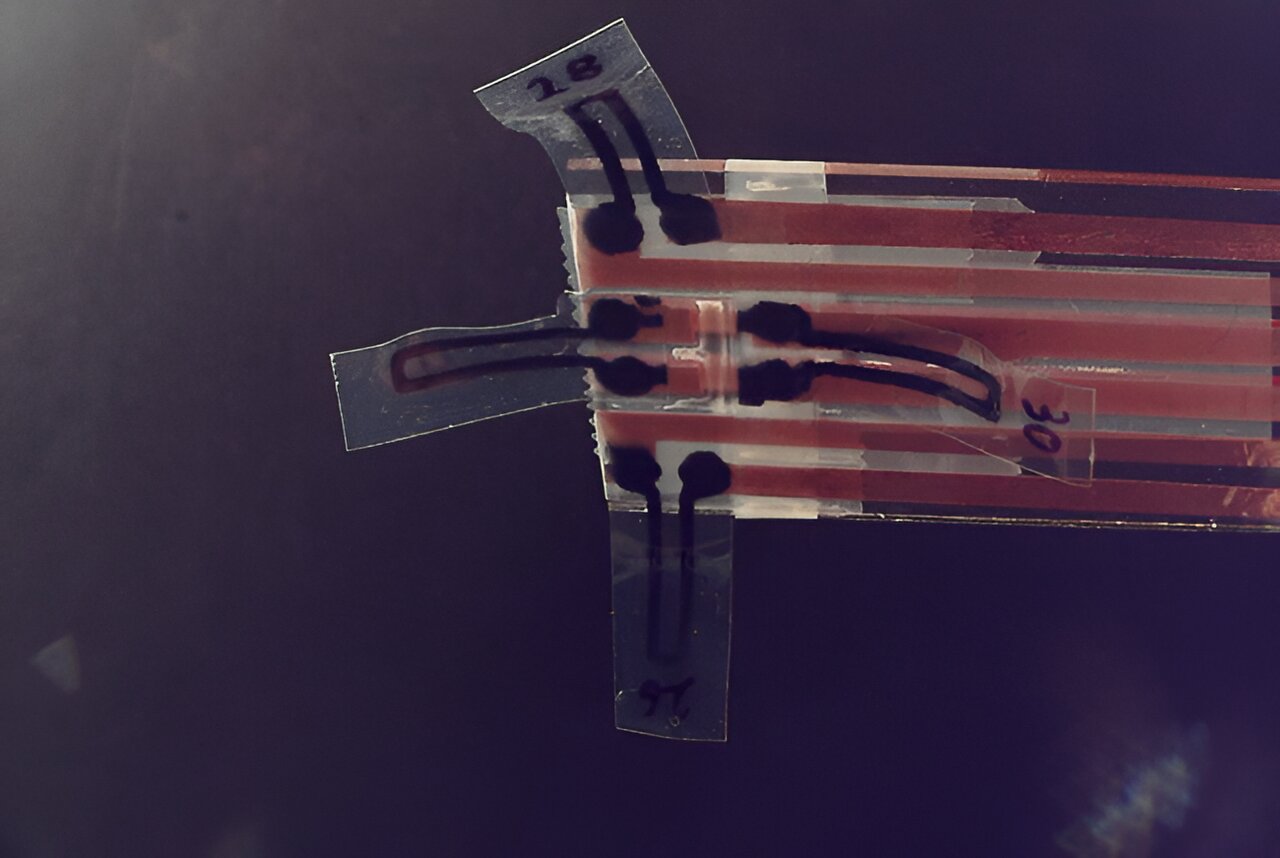
在他们的研究中,Van Hazendonk 和她的同事选择使用不同类型的可变形材料——液晶——以及石墨烯,制作出一种带有四个可控制和可变形“手指”的软夹持装置或“手”。
有趣的是,在过去 30 年左右的时间里,液晶和石墨烯都与诺贝尔物理学奖有着直接或间接的联系。早在 1991 年,皮埃尔-吉尔斯·德·热内斯 (Pierre-Gilles de Gennes) 就因其在液晶等复杂物质中的有序性方面的工作而获奖。2010 年,安德烈·海姆 (Andre Geim) 和康斯坦丁·诺沃肖洛夫 (Konstantin Novoselov) 因其在石墨烯方面的工作而获奖——石墨烯是一种超强材料,它也是透明的,并且是电和热的有效导体。
“液晶的行为取决于其受到的激发或干扰。当它流动时,它就像液体一样。但在特殊情况下,液体中的分子可以自行排列,形成规则的图案或结构,例如在高倍显微镜下在固体材料中看到的晶体,”Van Hazendonk 解释道。“液晶材料具有这种行为的能力,这对于制造软机器人来说是完美的。”
。DOI:10.1021/acsami.4c06130")
信用: ACS 应用材料与界面 (2024)。 DOI:10.1021/acsami.4c06130
执行器挑战
选定材料后,研究人员开始设计和制作执行器。“执行器控制和调节机器人系统的运动。通常,当通电、通气或通液时,执行器会做出反应或移动,”Van Hazendonk 说。“在我们的工作中,我们转向使用其他东西来驱动液晶网络 (LCN) 执行器。”
研究人员设计了一种夹持装置,该装置有四个“手指”,使用 LCN 执行器进行控制,这些执行器会根据石墨烯基加热元件或夹持器或“手”的手指或轨道上的热量而变形。
手指弯曲
“当电流通过黑色石墨烯轨道时,轨道会发热,然后轨道产生的热量会改变液晶手指的分子结构,一些分子会从有序变为无序。这会导致手指弯曲,”Van Hazendonk 说道。“一旦电流关闭,热量就会消失,夹钳就会恢复到初始状态。”
化学工程与化学系助理教授海纳·弗里德里希 (Heiner Friedrich) 强调,研究人员面临的最大挑战之一与石墨烯加热元件有关。
“我们需要确保它们加热到合适的温度来改变液晶层,我们需要确保这可以在安全电压下完成。最初,石墨烯元件在安全电压下没有达到合适的温度,否则它们会过热并烧毁设备,”弗里德里希说。“这个和许多其他重要问题都是扎菲里斯·哈利勒在他的硕士论文中解决的。”
研究人员没有让这个问题阻碍他们,最终他们设计出了一种可以在电压低于 15 伏时无任何问题运行的执行器。就性能而言,抓取器可以举起质量在 70 到 100 毫克之间的小物体。“这听起来可能不多,但在外科手术等医疗应用中,这对于微小工具、植入物或生物组织的精确和微小移动非常有用,”Van Hazendonk 说。
对于 Van Hazendonk 来说——她一边从事博士研究,一边担任北布拉班特省 (Provinciale Staten) 议会议员——这项研究让她大开眼界。
她说:“我喜欢这项工作如何将实用和实际应用结合起来。夹持装置基于基础技术,但执行器本身可以成为未来用于生物医学或外科手术的一套机器人的基础。”
未来,Van Hazendonk 和她的同事们有一些有趣的计划。她总结道:“我们想通过找到一种 3D 打印液晶层的方法,制造出一个完全打印的机器人。对于我们的夹持器,我们通过在模具中铸造材料来制作该层。Michael Debije 团队的其他研究人员已经证明液晶可以打印。对于这个夹持器,我们已经打印了石墨烯层,所以拥有一个完全打印的设备会很酷。”
更多信息:
Laura S. van Hazendonk 等人,《热手指:可单独寻址的石墨烯加热器驱动的液晶夹持器》, ACS 应用材料与界面 (2024)。 DOI:10.1021/acsami.4c06130
引用:采用石墨烯和液晶设计的新型软机器人夹持器(2024 年 6 月 18 日)于 2024 年 6 月 21 日检索自
本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。
1718970381
#采用石墨烯和液晶设计的新型软机器人夹持器
2024-06-18 16:44:23