
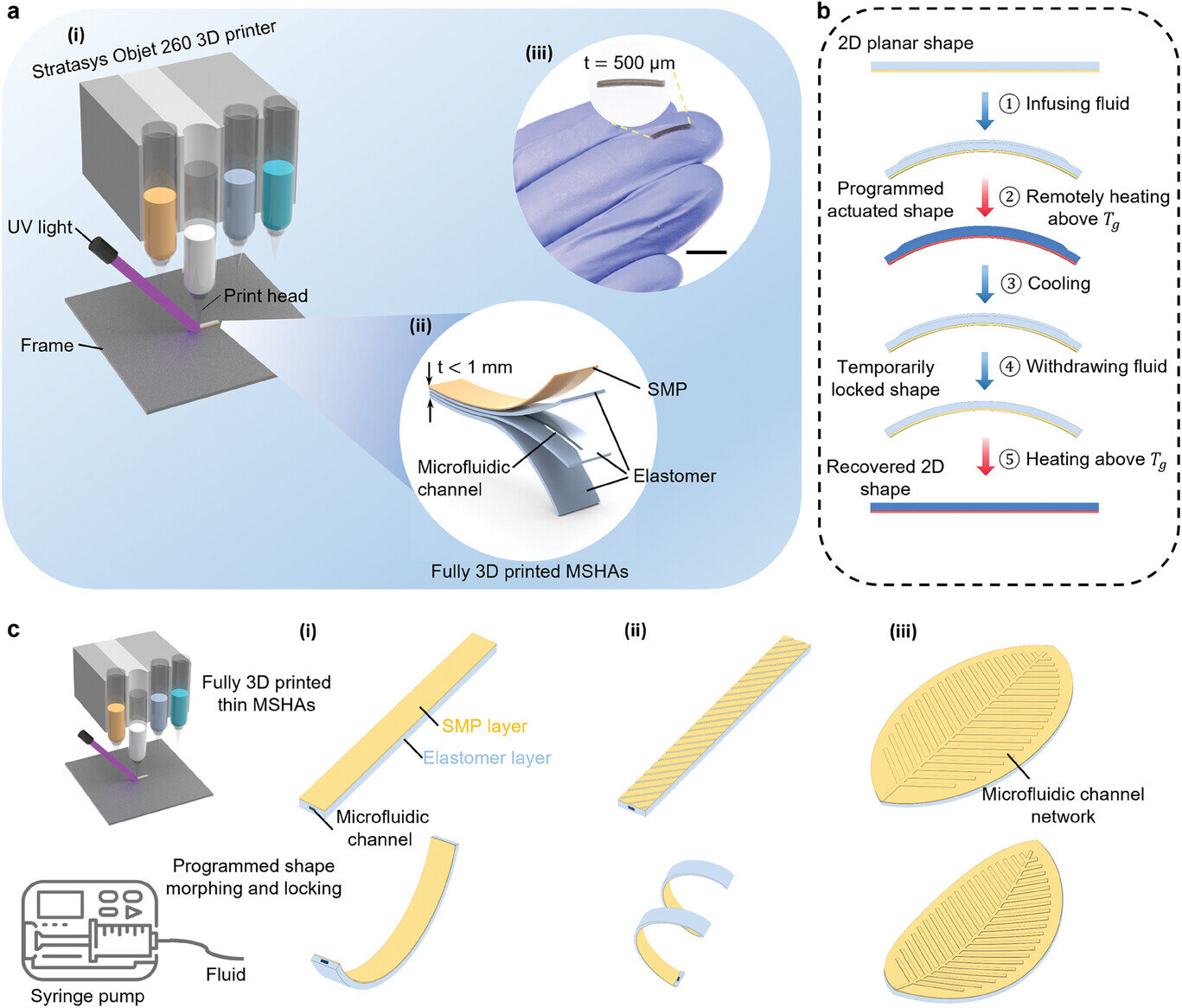
与 SME 集成的全 3D 打印微型亚毫米厚软液压执行器 (MSHA) 示意图,用于形状变形和形状锁定。来源: 先进材料 (2024)。DOI:10.1002 / adma.202402517
北卡罗来纳州立大学的研究人员展示了微型软液压执行器,可用于控制厚度不到一毫米的软机器人的变形和运动。研究人员还证明,该技术可与形状记忆材料配合使用,使用户能够反复将软机器人锁定为所需形状,并根据需要恢复到原始形状。
“软机器人在许多应用领域中都具有广阔的前景,但设计用于驱动小规模软机器人运动的执行器却极具挑战性,”该论文的通讯作者、北卡罗来纳州立大学机械与航空航天工程副教授尹杰说道。
“我们的方法利用市售的多材料 3D 打印技术和形状记忆聚合物来创建微尺度的软执行器,使我们能够控制非常小的软机器人,从而实现出色的控制和精细度。”
新技术依赖于制造由两层组成的软机器人。第一层是使用 3D 打印技术制造的柔性聚合物,并包含微流体通道图案——本质上是贯穿材料的非常小的管子。第二层是柔性形状记忆聚合物。总而言之,软机器人只有 0.8 毫米厚。
通过将流体泵入微流体通道,用户可以产生液压,迫使软机器人移动并改变形状。微流体通道的图案控制着软机器人的运动和形状变化——无论是弯曲、扭曲还是其他。此外,注入的流体量和注入速度控制着软机器人的移动速度和软机器人施加的力的大小。
如果用户希望“冻结”软机器人的形状,他们可以施加适度的热量(64°C 或 147°F),然后让机器人短暂冷却。这样可以防止软机器人恢复到其原始形状,即使在微流体通道中的液体被抽出之后也是如此。如果用户想让软机器人恢复其原始形状,他们只需在抽出液体后再次加热,机器人就会恢复到其原始配置。
“这里的一个关键因素是微调形状记忆层相对于包含微流体通道的层的厚度,”该论文的共同主要作者、北卡罗来纳州立大学前博士生 Yinding Chi 说道。“你需要形状记忆层足够薄,以便在施加致动器的压力时弯曲,但又足够厚,以使软机器人即使在压力消除后也能保持其形状。”
为了演示该技术,研究人员制作了一个软机器人“夹持器”,能够拾取小物体。研究人员施加液压,使夹持器夹紧物体。通过加热,研究人员能够将夹持器固定在“闭合”位置,即使在释放液压执行器的压力后也是如此。

微型软液压执行器可以控制厚度不到一毫米的软机器人的变形和运动。这张照片显示一个卷须状的软机器人缠绕在一个圆柱体上并将其举起。图片来源:北卡罗来纳州立大学 Jie Yin
然后,夹持器可以移动(将其夹住的物体运送到新位置)。然后,研究人员再次加热,使夹持器释放其拾起的物体。
“由于这些软机器人非常薄,我们可以使用小型红外光源快速轻松地将它们加热至 64 摄氏度,而且它们冷却得也很快,”论文共同第一作者、北卡罗来纳州立大学博士生 Haitao Qing 说道。“所以这一系列操作只需要大约两分钟。”
“而且这种动作不一定非要用夹子夹住,”Qing 说道。“我们还展示了一种受自然界藤蔓启发的夹子。这些夹子可以快速缠绕物体并将其紧紧夹住,从而实现牢固抓握。
“这篇论文是对这项新技术的概念验证,我们对这类微型软执行器在小型软机器人、变形机器和生物医学工程中的潜在应用感到非常兴奋。”
这篇论文题为《具有形状记忆效应的全 3D 打印微型软液压执行器,用于变形和操作》, 发布 在期刊上 先进材料。该论文由北卡罗来纳州立大学前博士生洪耀业、北卡罗来纳州立大学博士后研究员赵耀和李彦斌以及北卡罗来纳州立大学博士生齐方杰共同撰写。
更多信息:
Haitao Qing 等,具有形状记忆效应的全 3D 打印微型软液压执行器,用于变形和操作, 先进材料 (2024)。 DOI: 10.1002/adma.202402517
引用:3D 打印微型执行器可以移动小型软机器人,将它们锁定为新形状(2024 年 6 月 11 日)于 2024 年 6 月 12 日检索自
本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。
1718183257
#打印微型执行器可以移动小型软机器人并将其锁定为新形状
2024-06-11 16:29:31











