
你好,Electric Atlas – IEEE Spectrum
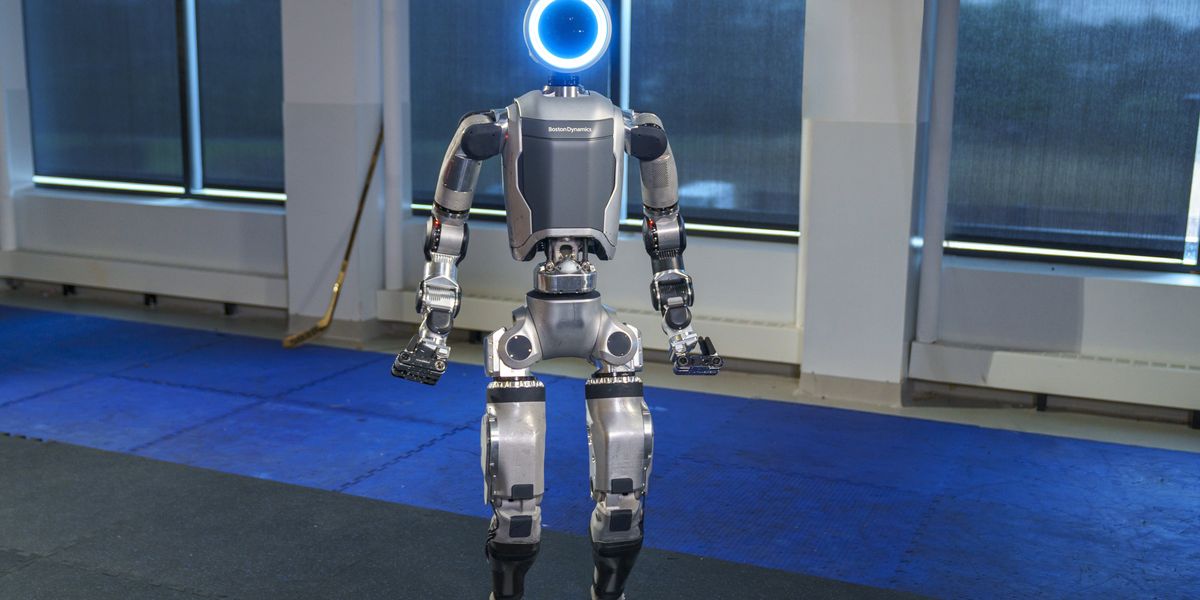
昨天, 波士顿动力公司告别标志性的 Atlas 人形机器人。 或者,无论如何,阿特拉斯的液压动力版本 – 如果你读到字里行间 视频描述 (或者甚至只是阅读视频描述的实际台词),很明显,尽管 液压阿特拉斯 尽管退休了,但这并不是波士顿动力公司阿特拉斯人形项目的结束。 事实上,Atlas 已经回来了,而且比以往任何时候都更好。 今天, 波士顿动力公司推出新版 Atlas 全电动汽车。 它由电池和电动执行器供电,不再需要混乱的液压系统。 它在力量和灵活性方面都超过了人类的表现。 波士顿动力公司首次将此称为 人形机器人 A 产品。 我们将了解波士顿动力公司今天宣布的所有内容,并在以下内容中提供更多详细信息 波士顿动力公司首席执行官罗伯特·普莱特的问答。 波士顿动力公司的新型电动人形机器人同时也是世界上最糟糕和保守得最好的秘密之一 机器人技术 在过去一年左右的时间里。 我的意思是,波士顿动力公司将利用与 Atlas 共同开发的人形机器人专业知识,并将其与生产全电动系统的经验相结合,这似乎是显而易见的,甚至是不可避免的。 点。 但只是因为某事 似乎 不可避免并不意味着它实际上 是 这是不可避免的,而波士顿动力公司在从头开始构建全电动人形机器人的同时,仍然一如既往地进行着令人钦佩的工作。 这是: 它是全新的,全电动的,其中一些动作让我有点不舒服(我们稍后会讨论这个)。 视频附带的博客文章缺乏技术细节,但让我们来看看最有趣的部分: 十年前,我们是少数真正投入研发精力的公司之一 人形机器人。 现在机器人行业的格局已经截然不同。 2010 年,我们回顾了所有 当时存在的人形机器人。 我想,你可以说本田正在投入真正的研发努力 阿西莫 那时,但是,是的,几乎所有其他人形机器人都来自研究而不是工业。 现在,感觉就像我们 商业类人机器人中我们的眼球但在过去的几年里,随着初创公司突然出现,推出了全新的人形机器人,波士顿动力公司(从外表上看)只是继续进行研发。 今天的公告无疑改变了这一点。 我们对我们的计划充满信心,不仅要创建令人印象深刻的研发项目,还要提供有价值的解决方案。 这一旅程将从现代开始——除了投资我们之外,现代团队还在建设下一代汽车制造能力,它将作为新阿特拉斯应用程序的完美测试场。 波士顿动力公司 […]
波士顿动力公司的罗伯特·普莱特谈新地图集
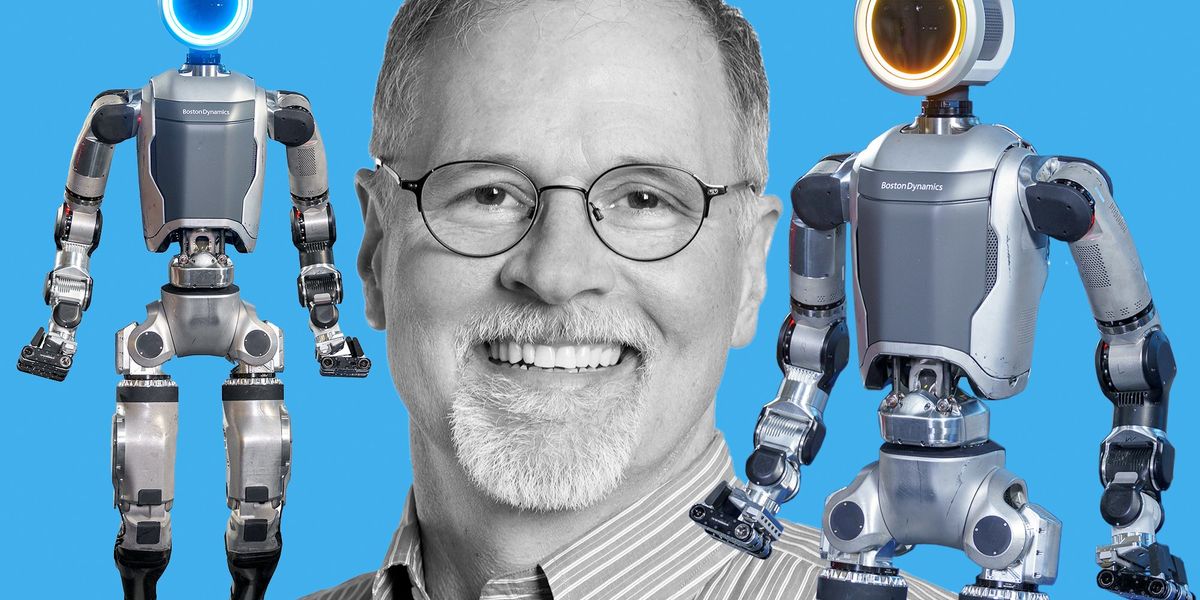
关于全电动产品化版本,我们已经有大约十年的被压抑的问题了。 阿特拉斯,我们很幸运能够与 波士顿动力公司首席执行官罗伯特·普莱特 详细了解这个机器人的来源以及它将如何商业化 人形机器人 (终于)发生了。 Robert Playter 从 1994 年开始担任波士顿动力公司的工程副总裁,我很确定当时波士顿动力公司仍打算成为一家建模和仿真公司,而不是一家 机器人技术 公司。 Playter 于 2019 年出任首席执行官,帮助公司完成了从研发到商业产品的艰难转型。 点, 拉紧,现在(或很快) 阿特拉斯。 我们与 Playter 讨论了波士顿动力公司到底花了这么长时间来制造这款机器人、Atlas 作为产品的愿景是什么、所有的极端灵活性以及接下来会发生什么。 罗伯特·普莱特谈: IEEE 频谱: 发生什么了? 罗伯特·普莱特: 波士顿动力公司制造了一个全电动人形机器人。 这是我们近 15 年努力开发人形机器人的最新一代产品。 我们将把它作为一种产品推出,针对工业应用、物流以及比您所看到的更加多样化的地方 拉紧—具有复杂几何形状的重物体,可能在制造类型的环境中。 我们已经制造了第一个机器人,我们相信这确实将为整个行业的下一代功能设定标准。 你怎么这么久?! 显然,我们已经在这台机器上工作了一段时间,因为我们一直在与旧版 Atlas 进行并行开发。 您可能已经看过其中一些 Atlas 移动支柱的视频——这就是向我们自己证明我们可以做到这一点的技术部分。 然后真正设计出下一代机器,它将比世界上见过的任何机器都要好一个数量级。 “我们并不急于展示一些高超的技术,而且在我们确信有一条通往产品的道路之前,我们也不想表明我们的意图。” ——罗伯特·普莱特,波士顿动力公司 对于 Spot,感觉就像是波士顿动力公司首先开发了该产品,而没有考虑到特定的用例:你把机器人放在那里,让人们发现它的好处。 你们的方法与 Atlas 有什么不同吗? 玩家: 你是绝对正确的。 Spot 是一种寻找产品的技术,我们花了一些时间才真正弄清楚我们在工业检测中的产品市场契合度。 […]
波士顿动力公司退役其传奇的人形机器人
在今天发布的新视频中,波士顿动力公司正在发送其液压阿特拉斯 人形机器人。 视频描述中写道:“近十年来,Atlas 激发了我们的想象力,启发了下一代机器人专家,并跨越了该领域的技术障碍。 现在是我们的液压系统的时候了 阿特拉斯机器人 放松一下。” 液压阿特拉斯确实赢得了一些放松; 波士顿动力公司对其人形研究项目绝对是无情的。 这并不是批评——有时,为了突破可能的极限,必须对硬件无情。 作为观众,我们只是享受它,这个精彩片段包括阿特拉斯做得很好的看不见的镜头以及阿特拉斯做得不太好的看不见的镜头。 老实说,这才是我们来这里的真正目的。 宠物人 旨在测试士兵用来保护自己免受化学战剂侵害的防护服。 它必须能够像士兵一样移动——行走、跑步、弯腰、伸展、爬行——以测试该套装在全方位运动中的耐用性。 为了尽可能准确地模拟人类,PETMAN 甚至能够“出汗”。 相对于 当时还有其他人形机器人 (迄今为止,其中最著名的是本田的 阿西莫),PETMAN的动作和平衡非常非常令人印象深刻。 同样令人印象深刻的是可能是无意的方式 这段 PETMAN 视频与 Bee Gees 乐队的 Stayin' Alive 音乐视频同步。 无论如何,DARPA 对所有这些令人印象深刻的事情印象深刻,并且 选择波士顿动力 建造另一个用于 DARPA 的人形机器人 机器人技术 挑战。 这个机器人十年前就亮相了。 刚果民主共和国的特点是 [still looking for a collective noun for humanoid robots] Atlases 的设计,波士顿动力似乎对外形着迷,因为刚果民主共和国决赛后不到一年,该公司宣布 下一代Atlas,它可以做一些有用的事情,比如移动盒子。 每隔六个月左右,波士顿动力公司就会发布一个新的 Atlas […]
Marco Hutter 希望解决机器人技术难题
去年12月, 人工智能研究所 宣布这是 在苏黎世开设办事处 作为其波士顿总部的欧洲对应机构,并聘请 Marco Hutter 来领导该办事处。 哈特还经营着 苏黎世联邦理工学院机器人系统实验室,可以说是最著名的起源 ANYmal 四足机器人 (但它也确实 大量其他很酷的东西)。 我们正在尽力密切关注 该研究所,因为这是目前极少数机器人专家拥有必要的长期资源和愿景的地方之一,可以在解决工业界或学术界都不太适合的真正难题上取得实质性进展。 该研究所仍在扩大规模(苏黎世的分支机构才刚刚启动),但我们确实发现了波士顿人员一直在从事的一些项目,正如您从本页顶部的剪辑中看到的那样,他们看起来很酷。 与此同时,我们有机会与 Marco Hutter 进行了交流,了解苏黎世办事处将开展哪些工作以及他将如何解决该地区的所有难题。 机器人技术。 他们全部! 您能告诉我们多少关于您将在人工智能研究所从事的工作吗? 马可·哈特: 如果你知道我过去在 ETH 和我们的初创公司所做的研究,就会发现,在使系统更具移动性、使系统更有能力与世界互动、使系统在硬件和技术上总体上更有能力方面存在重叠。软件方面。 这就是该研究所努力的目标。 该研究所将自己描述为一个研究组织,旨在解决机器人和人工智能领域最重要和最基本的问题。 您认为这些问题是什么? Marco Hutter 是人工智能研究所新苏黎世分部的负责人。瑞士机器人日 哈特: 有很多问题。 如果你今天看到机器人,我们不得不承认它们仍然非常愚蠢。 它们移动的方式、它们理解环境的能力、它们与非结构化环境交互的方式——我认为我们在机器人方面仍然缺乏很多技能,无法让机器人完成我们希望的所有任务他们要做的事。 所以我们的野心是让这些机器人接管所有这些枯燥、肮脏和危险的工作。 但老实说,今天最大的影响实际上只是乏味的部分。 我认为这些肮脏而危险的工作,我们确实需要机器人的支持,但仍然需要在机器人和人工智能方面进行大量基础工作,才能取得足够的进展,让机器人成为有用的工具。 您认为该研究所的哪些方面将帮助机器人技术在这些领域取得更大进展? 哈特: 我认为该研究所是这些独特的地方之一,我们试图将学术界的好处和企业界的好处结合在一起。 在学术界,我们有各种疯狂的想法,我们尝试将它们向各个不同的方向发展,但同时,我们的工程支持有限,我们只能走这么远。 制造强大且可靠的硬件系统需要付出巨大的努力,而这种工程最好在公司实验室中完成。 您已经通过我的实验室过去所做的工作类型看到了这一点。 我们建造了具有一点移动能力的简单四足动物,但为了使它们变得坚固,我们最终不得不 把它旋转出来。 我们必须把它带到企业界,因为对于一个研究小组,一个纯粹的学术小组来说,这是不可能的。 但与此同时,你也失去了一些东西,对吗? 一旦你进入企业界并开始经营一家企业,你就必须非常专注; 你不能再那么探索和自由了。 因此,如果通过该研究所将这两件事结合在一起,通过长期规划、足够的财政支持以及美国和欧洲的杰出人才的共同努力,我认为这将有望帮助我们在接下来的几年中取得重大进展。年。 “我们与传统公司非常不同,在传统公司中,在某些时候你需要拥有一种能够赚钱的产品。 […]
周五视频:共同表达 – IEEE Spectrum
视频星期五是您每周精选的精彩内容 机器人技术 视频,由您的朋友收集 IEEE 频谱 机器人技术。 我们还发布了未来几个月即将举行的机器人活动的每周日历。 请 将您的活动发送给我们 以便纳入。 RoboCup 德国公开赛:2024 年 4 月 17 日至 21 日,德国卡塞尔 AUVSI XPONENTIAL 2024:2024 年 4 月 22 日至 25 日,加利福尼亚州圣地亚哥 2024 年欧洲机器人公开赛:2024 年 5 月 8 日至 11 日,法国永河畔拉罗什 ICRA 2024:2024 年 5 月 13 日至 17 日,日本横滨 2024 年机器人世界杯:2024 年 7 月 17 日至 22 […]
波士顿动力公司推出新的 Spot 变体用于研究
上周在 NVIDIA GTC 上,Boston Dynamics 首席技术官 Aaron Saunders 发表了有关在现实世界机器人中部署 AI 的演讲,即 Spot 如何利用 强化学习以提高运动能力 (我们去年与桑德斯交谈过 关于机器人摔倒)。 Spot 已经获得了 很多 更好——一个 现货机器人 即使 Spot 舰队每三个月集体行走足以绕地球一圈,平均每 50 公里就会翻滚一次。 该车队由大量商业部署组成,这对于任何移动机器人来说都是令人印象深刻的,但部分原因是因为当前版本的 Spot 确实不适合用于 机器人技术 研究,尽管 100 多所大学至少拥有一个 Spot。 波士顿动力公司尚未向开发人员提供 Spot 关节的访问权限,这意味着任何想要探索四足移动性的人都必须寻找其他更开放并允许进行一些实验的平台。 波士顿动力公司现在宣布推出 Spot 的新变体,其中包括一个低级应用程序编程接口 (API),可以对机器人进行关节级控制。 这将让(几乎)完全控制 Spot 如何移动它的腿,这对机器人社区来说是一个巨大的机会,因为我们现在能够准确地了解 Spot 的能力。例如,我们已经听说过 可靠的消息来源 Spot 的运行速度比波士顿动力公司公开展示的要快得多,并且可以肯定地认为更快的 Spot 只是一个开始。 可以在机器人上使用自定义运动控制器时的新 Spot 功能示例。波士顿动力公司 当您从 […]
周五视频:GR00T 项目 – IEEE Spectrum
视频星期五是您每周精选的精彩内容 机器人技术 视频,由您的朋友收集 IEEE 频谱 机器人技术。 我们还发布了未来几个月即将举行的机器人活动的每周日历。 请 将您的活动发送给我们 以便纳入。 2024 年欧洲机器人公开赛:2024 年 5 月 8 日至 11 日,法国永河畔拉罗什 ICRA 2024:2024 年 5 月 13 日至 17 日,日本横滨 2024 年机器人世界杯:2024 年 7 月 17 日至 22 日,荷兰埃因霍温 欣赏今天的视频! 了解 NVIDIA 从开创先进的自动驾驶汽车硬件和模拟工具,到加速自动移动机器人和工业手臂的感知和操作,最终催生下一波尖端 AI 浪潮的历程 人形机器人。 [ NVIDIA ] 在 4.0 版本中,我们借助强化学习的力量提升了 Spot 的运动能力。 波士顿动力公司的机器人工程师 Paul Domanico […]
周五视频:Acrobot 错误 – IEEE Spectrum
视频星期五是您每周精选的精彩内容 机器人技术 视频,由您的朋友收集 IEEE 频谱 机器人技术。 我们还发布了未来几个月即将举行的机器人活动的每周日历。 请 将您的活动发送给我们 以便纳入。 网络马拉松挑战: 2024 年 2 月 2 日,苏黎世 人类研究所2024:2024 年 3 月 11 日至 15 日,科罗拉多州博尔德。 2024 年欧洲机器人公开赛:2024 年 5 月 8 日至 11 日,法国永河畔拉罗什 ICRA 2024:2024 年 5 月 13 日至 17 日,日本横滨 欣赏今天的视频! 就像真人一样,Acrobot 有时会踢你的脸。 [ Acrobotics ] 谢谢,伊丽莎白! 你让我看到了“像蠕虫一样的无肢机器人”。 [ GitHub ] 通过 […]
周五视频:有腿的单轮机器人
视频星期五是您每周精选的精彩内容 机器人技术 视频,由您的朋友收集 IEEE 频谱 机器人技术。 我们还发布了未来几个月即将举行的机器人活动的每周日历。 请 将您的活动发送给我们 以便纳入。 网络马拉松挑战: 2024 年 2 月 2 日,苏黎世 人类研究所2024:2024 年 3 月 11 日至 15 日,科罗拉多州博尔德。 2024 年欧洲机器人公开赛:2024 年 5 月 8 日至 11 日,法国永河畔拉罗什 ICRA 2024:2024 年 5 月 13 日至 17 日,日本横滨 欣赏今天的视频! 在本视频中,我们介绍了 Ringbot,这是一种新型腿轮变形机器人,结合了带腿的单轮机构。 Ringbot 旨在通过将传统单轮车的驾驶员和驱动部件替换为安装在车轮内紧凑驱动模块上的腿来提供多功能移动性。 [ Paper ] 通过 [ KIMLAB ] […]
周五视频:敏捷但安全
视频星期五是您每周精选的精彩内容 机器人技术 视频,由您的朋友收集 IEEE 频谱 机器人技术。 我们还发布了未来几个月即将举行的机器人活动的每周日历。 请 将您的活动发送给我们 以便纳入。 网络马拉松挑战: 2024 年 2 月 2 日,苏黎世 2024 年欧洲机器人公开赛:2024 年 5 月 8 日至 11 日,法国永河畔拉罗什 ICRA 2024:2024 年 5 月 13 日至 17 日,日本横滨 欣赏今天的视频! “scampiest”是一个词吗? 如果不是,那也应该是,因为这是我见过的最狡猾的机器人。 [ ABS ] GITAI很高兴地宣布,其1.5米长自主双机械臂系统(S2)已搭乘SpaceX猎鹰9号火箭(NG-20)成功抵达国际空间站(ISS),进行内部演示。国际空间站上的空间服务、组装和制造 (ISAM)。 S2 技术演示的成功将成为 GITAI 的一个重要里程碑,证实了该技术作为太空中全面运行系统的可行性。 [ GITAI ] 如果你想代表机器人筋疲力尽,完整的 400 米短跑如下。 [ Hybrid […]