
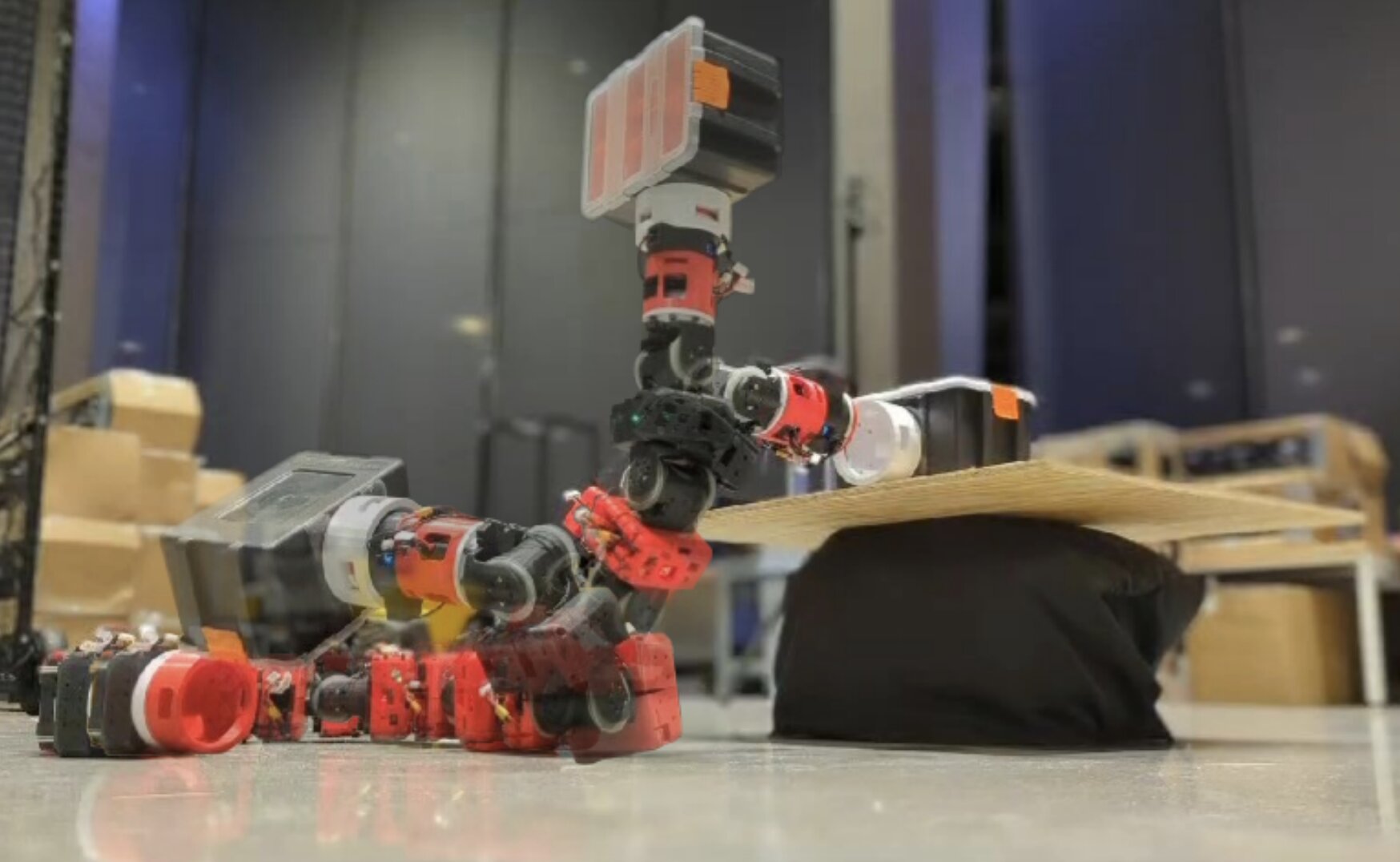
图片来源:Salagame 等人。
蛇形机器人比传统的轮式或腿式机器人具有多种优势。例如,蛇形机器人可以调整身体形状,进入狭窄空间,并在人类和其他机器人无法进入的环境中自由移动。
然而,与许多轮式和腿式机器人相比,大多数蛇形机器人无法拾取和操纵物体。这极大地限制了它们在现实世界中的应用,因为它们无法完成需要与周围环境进行更高级交互的任务。
东北大学硅突触实验室的一个研究小组在 Alireza Ramezani 教授的指导下,最近推出了一种新方法,可以让蛇形机器人同时移动和操纵物体。这种方法在一篇论文中介绍 已出版 在 论文集,最初是在 COBRA 上实现的,COBRA 是一个机器人平台,由东北大学的一组学生在 BIG Idea 竞赛中开发。
西北大学博士生 Adarsh Salagame 告诉 Tech Xplore:“我们开发蛇形机器人 COBRA 已经近三年了。这个项目最初是为了探索替代运动能力。
“与标准的轮式或腿式机器人不同,蛇形机器人通常具有多种运动能力,因为它们可以变形为不同的形状,并且可以控制身体的哪些部位与地面接触。与轮式或腿式机器人相比,这需要更精确地调节接触力,因为轮式或腿式机器人只有特定的身体部位接触地面。”
通过成功让 COBRA 机器人变形成不同的形状,Salagame 和他的同事能够拓展它的运动技能,展示出五种不同的运动方式。随后,他们还开始探索增强机器人物体操控技能的可能性。
“为了使 COBRA 机器人更加实用和灵活,将其应用范围扩大到传统机器人无法触及的领域,我们提出了物体移动操控的概念,即将移动和操控结合在一起,”Salagame 说道。“这就是我们通过 COBRA 实现的。”
COBRA 机器人的头部集成了一个夹持装置,用于在特定的运动模式(即翻滚)中协助机器人。当机器人翻滚时,其头部和尾部会锁在一起形成一个轮状结构,从而使其能够以高速被动地从斜坡上滚下来。
“我们重新设计了机器人的夹爪,使其可以抓住箱子,然后将其捡起并移动到其他位置,”萨拉盖姆说。“这让我们既能灵巧地操作箱子,又能在狭窄的空间、斜坡或标准机器人无法操作的区域中移动。”
为了实现他们提出的机器人操控方法,Salagame 和他的同事开发了一种基于优化的规划器,该规划器考虑地面反作用力来规划机器人的运动和物体操控策略。在他们最近的论文中,研究人员测试了这种规划器并证明了其可行性。
“我们首先通过研究真实机器人的开环行为来测试这种方法,”萨拉盖姆说。“下一步将是在模拟中实现这个闭环,然后最终在真实机器人上实现。但这项研究向我们表明,我们的方法是可行的。我们正在解决的任务并不简单,因为当你与地面有如此多的接触时,你的关节就会产生大量的滑动和柔顺性,从而导致许多错误。”
该研究团队最近的研究证明了在蛇形机器人中同时解决运动和操纵问题的可行性。到目前为止,研究人员已经使用他们的方法研究了 COBRA 机器人与地面和箱子的相互作用。未来,Salagame 和他的合作者计划在更多用途的操纵任务上进一步测试他们的方法。
“我们在 COBRA 上添加了一个传感器套件,包括摄像头和 IMU,我们希望利用机器人的侧向运动来解决更多自主运动任务,”Salagame 补充道。“这是一个令人兴奋的新方面,在机器人中很少见。利用这种变形能力来改变机器人的惯性特性并改变翻滚的方向。
“我们还将使用摄像头来解决闭环物体操作问题,让机器人识别盒子、捡起它并将其移动到不同位置,从而有可能解决涉及高级规划的有趣任务。”
更多信息:
Adarsh Salagame 等人,《滑行机器人中的非脉冲接触隐式规划局部操控》, 论文集 (2024)。 DOI:10.48550/arxiv.2404.08174
© 2024 科学X网络
引用:一种让蛇形机器人能够同时进行运动和操控的方法 (2024 年 5 月 26 日) 于 2024 年 5 月 26 日检索自
本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。
1716731616
#一种使蛇形机器人能够同时进行运动和操纵的方法
2024-05-26 13:00:01










