就在上个月,总部位于奥斯陆的 1X(原 Halodi 机器人技术)宣布了 1 亿美元的 B 轮融资,显然它一直在投入工作。 上周发布的新视频 显示了一个 [insert collective noun for humanoid robots here] EVE android-ish 移动操纵器在做什么 利用端到端神经网络的各种任务 (像素到动作)。 最重要的是,该视频似乎或多或少是一个诚实的视频:一次拍摄,以(适当的)1 倍速度,并且完全自主。 但我们仍然有疑问! 1X 有答案。
如果像我一样,您在观看此视频后有一些非常重要的问题,包括该植物是否真的死了以及加权伴侣立方体的命运,您将需要阅读此问答 埃里克·张,副总裁 人工智能 1X。
拍了多少次才拍到这个镜头?
艾里克·张: 大约有 10 个持续时间超过一分钟的镜头; 这是我们第一次制作这样的视频,所以更多的是学习如何协调摄制组并设置拍摄看起来令人印象深刻。
您是否专门训练您的机器人处理软质物体和透明物体?
张: 没有! 我们训练我们的神经网络来拾取各种物体——包括刚性的、可变形的和透明的物体。 因为我们从像素端到端地训练操作,所以拾取可变形物体和透明物体比经典的抓取管道容易得多,在经典的抓取管道中,你必须弄清楚你想要抓取的物体的确切几何形状。
是什么阻碍您的机器人更快地完成这些任务?
张: 我们的机器人从演示中学习,因此它们的运行速度与人类远程操作员演示任务的速度完全相同。 如果我们聚集展示我们移动速度更快的地方,机器人也会如此。
多少 加权同伴立方体 在制作该视频的过程中受到伤害吗?
张: 在 1X 时,加权同伴立方体没有权限。
这是一种非常酷的充电方法,但它似乎比直接与底座连接的某种驱动接口要复杂得多。 为什么要使用操纵呢?
张: 你是对的,这不是给机器人充电的最简单的方法,但如果我们要成功地完成我们的使命,建造能够操纵各种物体的通用且可靠的机器人,我们的神经网络就必须是至少能够完成这个任务。 另外,它还大大降低了成本并简化了系统!
那个蓝色的毛绒玩具应该是什么动物?
张: 我认为这是一条肥胖的鲨鱼。
该视频中有多少种不同的机器人?
张: 17? 还有更多是静止的。
如何区分机器人?
张: 它们的底座上印有少量数字。
那株植物死了吗?
张: 是的,我们把它放在那里是因为 CGI/3D 渲染的视频不会遇到添加死植物的麻烦。
橱窗里的机器人面临着什么样的生存危机?
张: 它是 应该是 反复打开和关闭窗口(有利于测试统计显着性)。
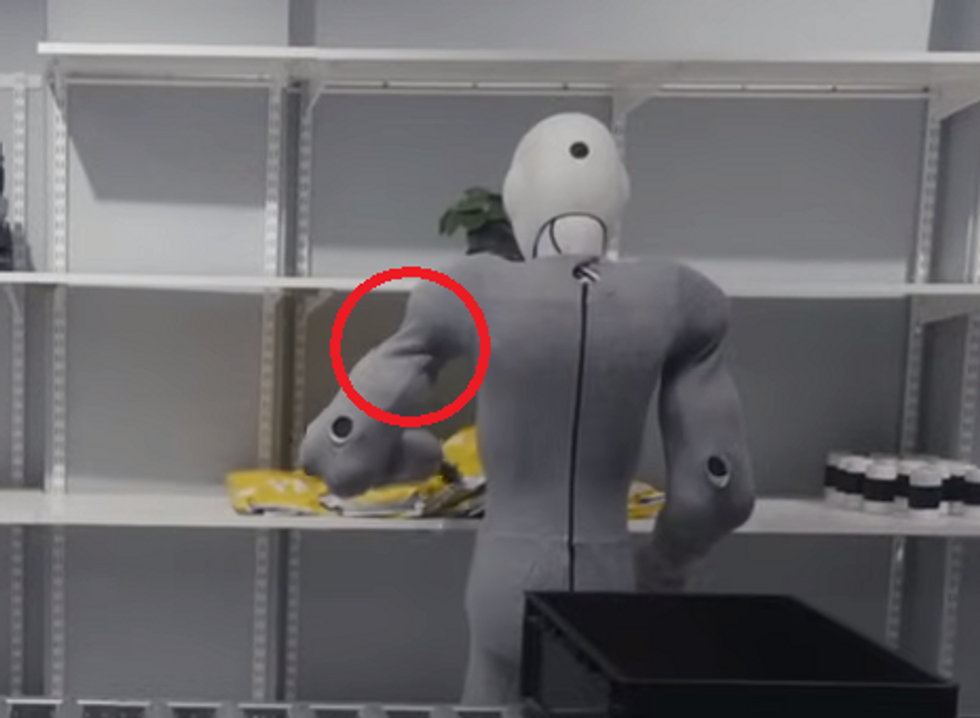
如果其中一个机器人实际上是一个戴着头盔、穿着西装、拿着抓手、站在移动底座上的人类,我能分辨出来吗?
张: YouTube 视频上的这条评论让我感到非常受宠若惊:
但如果你观察一下上臂在肩膀处逐渐变细的区域,你就会发现,对于人类来说,在肩膀仍然如此宽阔的情况下,它太薄了,无法容纳在里面:
为什么你的机器人总是那么快乐? 您是否计划用他们的脸做更复杂的 HRI(人机交互)?
张: 是的,更复杂的 HRI 内容正在酝酿之中!
您的机器人能够相互自主协作吗?
张: 敬请关注!
张: 接得好! 是的,绿色的是其中最糟糕的,因为有很多有效的方法可以用夹具捏住它并将其举起。 在机器人学习中,如果有多种方法来拾取某物,实际上可能会混淆机器学习模型。 有点像要求汽车同时左转和右转以避开一棵树。
其他人的机器人都在煮咖啡。 你们的机器人可以煮咖啡吗?
张: 是的! 我们原本计划在这段视频中加入一些咖啡制作作为复活节彩蛋,但咖啡机在电影拍摄前就坏了,结果在挪威不可能通过次日发货获得 Keurig K-Slim 。
1X 目前正在招聘 AI 研究人员(专业包括模仿学习、强化学习和大规模训练)和 Android 操作员(!),这实际上听起来是一个超级有趣的工作。 更多这里。
来自您网站的文章
网络上的相关文章
2024-02-12 21:07:28
1708300149