
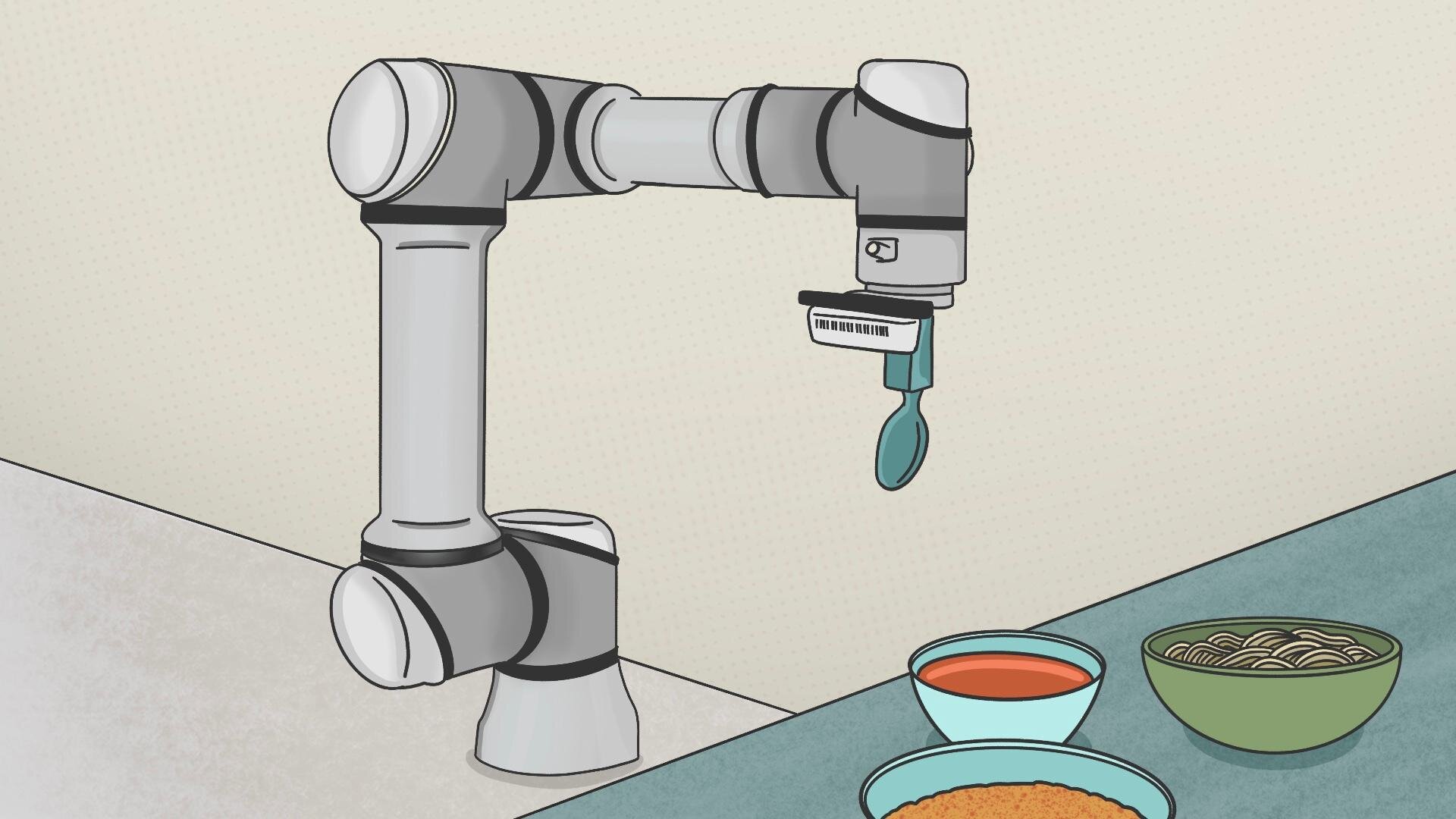
马里兰大学的一个团队正在开发一种机械臂,可以识别和运输辅助护理环境中提供的各种食物,从液体食物到半固体食物,如酸奶和豆腐,再到谷类食品。图片来源:Valerie Morgan
作为印度德里的一名本科工程专业学生,阿米莎·巴斯卡 (Amisha Bhaskar) 到一家残疾退伍军人机构进行实地考察,并遇到了一位失去双手的男子。当她问他什么技术可以改善他的生活时,他的回答给他留下了不可磨灭的印象:他想要一些东西,这样他就可以照顾自己,而不必依赖别人。
巴斯卡现在是马里兰大学计算机科学专业的二年级博士生,她的研究领域是受伤退伍军人的广泛要求。她与机器人算法和自主系统实验室的其他人合作,开发一种创新的机器人工具,帮助行动不便的人自己进食。
该团队的工作上个月在 IEEE 国际机器人与自动化会议上获得了认可(ICRA 2024) 在日本横滨举行的烹饪与机器人专业研讨会上,Bhaskar 作为主要合著者提交的论文获得了最高荣誉。 可用的 在 论文集 预印本服务器。
马里兰大学的研究人员表示,现有的机器人辅助喂食技术非常有限。商用机器人手臂的动作是固定的、预先编程好的,只能在盘子上的特定位置拾取食物,而且它们缺乏检测自己是否完成了这项任务的能力。
巴斯卡说:“它们并不是边走边学,所以无论你想不想吃,或者食物是否被捡起来,它们都会继续做这个动作。”
她解释说,机器人辅助喂食可以分为两个步骤:“获取”步骤涉及用器具拾起食物,而转移步骤是食物到达人嘴里而不掉落或发生其他意外的过程。
Bhaskar 和马里兰大学团队目前正在研究拾取食物的步骤,他们有一个远大的目标。虽然其他研究小组有时只将用餐具拾取食物一次视为成功,但马里兰大学团队的目标是将食物从盘子里取出来。
该系统必须能够识别和运输辅助护理环境中提供的各种食物——从液体食物到半固体食物,如酸奶、豆腐和谷物。
研究人员表示,机器人面临的最大挑战之一是处理一道菜中质地和稠度各异的食物。例如,拉面就是一种复杂的情况,包括液体汤、软豆腐、固体蔬菜和形状不规则的面条,这仍然是最大的挑战,Bhaskar 说。“每个元素都需要不同的策略,其中一些必须结合起来,”她说
马里兰大学高级计算机研究所计算机科学副教授普拉塔普·托克卡 (Pratap Tokekar) 表示,跨学科方法在该项目的成功中发挥了关键作用。
他说:“我们正在研究的技术涉及计算机视觉、人工智能、深度神经网络、机械工程等——所有这些技术都需要无缝地结合在一起,以便机器人系统既能保证用户的安全,又能高效地完成手头的任务。”
托克卡 (Tokekar) 是巴斯卡 (Bhaskar) 和另一名参与该项目的研究生、计算机科学专业三年级博士生刘睿 (Rui Liu) 的学术顾问。
对于刘来说,机器人辅助喂食是一个相对较新的研究领域,他之前专注于计算机视觉和人机交互。但和巴斯卡一样,刘看到了这个领域可以大大改善人们的生活,特别是老年人或行动不便、难以自行进食的人的生活。
其他团队成员包括 24 届博士生 Vishnu D. Sharma 和 23 届博士生光耀石 (Guangyao Shi),现为南加州大学的博士后研究员。
虽然该项目可能还需要几年时间才能投入实际应用,但 Tokekar 对团队的进展充满信心,尤其是对 Bhasker 和刘的热情和高度专注。
“这个项目最棒的地方在于,我们每次见面,他们都会提出 10 个新想法,”托克卡说。“不是我告诉他们该做什么,他们已经知道该做什么了。我只是帮助他们形成想法。”
更多信息:
Amisha Bhaskar 等人,LAVA:基于长视域视觉动作的食物获取, 论文集 (2024)。 DOI:10.48550/arxiv.2403.12876
引用:研究人员的机器人系统旨在提高行动不便人士的自主能力(2024 年 7 月 1 日)于 2024 年 7 月 3 日检索自
本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。
1720008673
#研究人员的机器人系统旨在提高行动不便人士的自主能力
2024-07-01 18:39:04











.jpg?ext=.jpg)