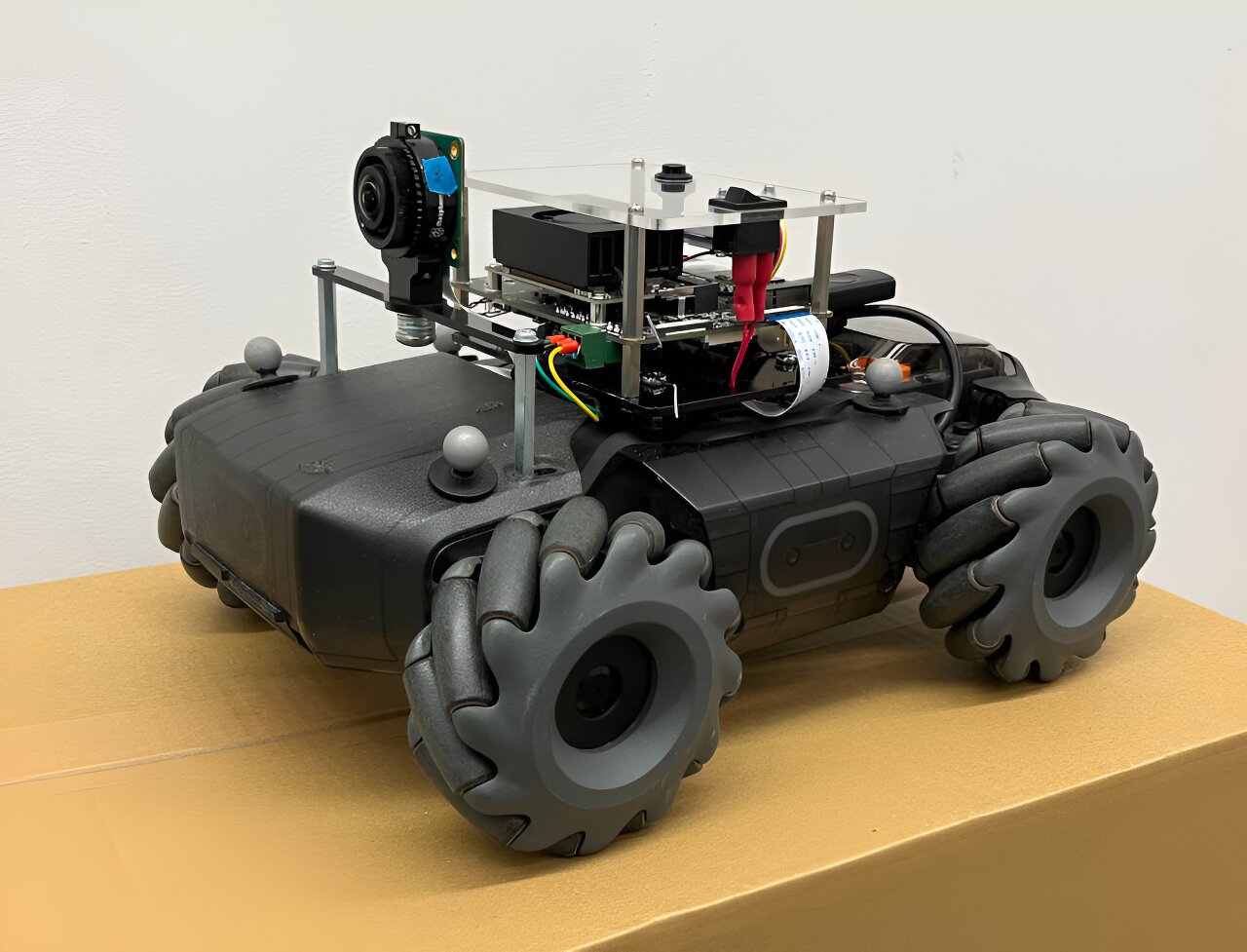
配备定制计算和传感器的 Cambridge RoboMaster 近照。来源:Blumenkamp 等人。
机器人团队有潜力比单个机器人完成更复杂的任务,例如,更快地覆盖长距离、同时访问不同的地点或监控更大的地理区域。结合可靠的硬件和软件用于多机器人应用的平台可以帮助推进该领域的研究,促进在特定的现实环境中测试机器人团队。
剑桥大学的研究人员最近推出了 Cambridge RoboMaster,这是一个很有前途的多机器人研究平台。该平台概述如下: 纸 预发布于 论文集,包括设计一批定制的 Robomaster 轮式机器人,以及用于模拟和训练机器人执行特定任务的软件。
“我们的使命是开发多机器人和多智能体系统中的集体智能解决方案,”首席研究员 Amanda Prorok 告诉 Tech Xplore。“这项研究结合了机器学习、规划和控制的方法,应用范围广泛,包括自动运输、物流、环境监测以及搜索和救援。为了验证我们的研究,我们需要一个强大而强大的机器人平台。”
布鲁门坎普和他的同事着手开发一个多机器人研究平台,以满足一系列要求,即最先进的计算能力、速度、灵活性和耐用性。最终,他们决定使用 DJI RoboMaster S1 机器人的定制版本,这是一种小型轮式机器人,最初是为高中和大学级别的比赛设计的。
“这个平台为我们提供了坚实的基础,我们可以在此基础上满足我们的特定需求,”Blumenkamp 说。“在过去三年中,我们一直在研究这个机器人平台,并不断迭代和改进其功能。在此期间,我们增加了功能更强大的计算机、传感器和控制软件,并将其应用于多个项目,总共六个。”
在各种项目和比赛中成功部署 DJI RoboMaster S1 机器人后,研究人员决定将其展示给机器人研究界。为此,他们创建了最近论文中介绍的平台,其中包括硬件设计、源蓝图和软件,可让该领域的其他人尝试 RoboMaster 机器人团队。
“Cambridge RoboMaster 是一款紧凑而强大的机器人平台,旨在推动多智能体研究,”Blumenkamp 解释道。“它基于 DJI RoboMaster S1 构建,我们通过用功能更强大的计算机替换主计算机来增强它的性能。我们的定制控制器将平台推向了物理极限,使其最高速度达到 4.5 米/秒。这使其成为室内环境中多机器人实验的高度灵活和有效的测试平台。”

五位剑桥 RoboMaster 处于需要严格队形控制的场景中。图片来源:Blumenkamp 等人。
剑桥 RoboMaster 的最大优势之一是它在机器人尺寸和能力之间实现了完美平衡。事实上,该团队定制的 DJU RoboMaster S1 机器人克服了小型机器人(通常计算能力不足)和大型机器人(通常价格昂贵且太大而无法在室内部署)的局限性。
“我们的平台包括一个控制堆栈,用于实现完全车载自主性和点对点通信,并且可以直接从我们的 模拟框架 无需额外培训,”布鲁门坎普说。
“此外,Cambridge RoboMaster 价格低廉,约为 700 美元,研究人员可以轻松使用。它集经济实惠、先进功能和多功能性于一体,是多智能体系统中广泛研究演示和实际应用的理想工具。”
值得注意的是,Cambridge RoboMaster 机器人既灵活又经济高效,因此易于在学术和研究环境中制造和测试。因此,世界各地的大学和机器人实验室可以快速将该平台集成到他们的实验工作中,例如用它来测试多机器人任务规划算法。
研究人员已在各种测试中测试了他们的机器人,证明了它们的节能性和多功能性。例如,研究人员发现,这些机器人可以在平坦的地形上有效地在室内和室外环境中导航。
“虽然我们并不打算将这个平台直接用于现实环境,但它可以作为一个理想的代理,以及一个研究工具,用于测试适用于多智能体导航的算法,”Blumenkamp 说。“这样的场景与现实世界领域相关,包括仓库自动化和物流。”
到目前为止,剑桥 RobotMaster 已被证明是一个高度通用、可靠且易于使用的多机器人研究测试平台。开始使用该平台进行实验所需的硬件、软件和模拟工具, 发布在 GitHub 上,很快就会被世界各地的研究小组用来测试各种多机器人应用的算法,包括自动运输物流、环境监测和搜索救援任务。
“对于未来的研究,我们有令人兴奋的计划,将在各种项目中使用该平台。目前,我们专注于改进机载传感、分散通信和控制,”Blumenkamp 补充道。
“我们还在研究如何利用这个平台作为将我们的研究成果应用到无人机上的桥梁。通过不断增强和扩展这个平台的功能,我们的目标是突破多机器人和多智能体系统研究的极限。也许有一天,我们会看到这些机器人踢足球。”
更多信息:
Jan Blumenkamp 等人,《剑桥 RoboMaster:一个敏捷的多机器人研究平台》, 论文集 (2024)。 DOI:10.48550/arxiv.2405.02198
© 2024 科学X网络
引用:研究团队推出了一个敏捷的多机器人研究平台(2024 年 6 月 1 日)于 2024 年 6 月 2 日检索自
本文件受版权保护。除出于私人学习或研究目的的合理使用外,未经书面许可不得复制任何部分。内容仅供参考。
1717378166
#研究团队推出敏捷多机器人研究平台
2024-06-01 14:00:01