作者:Andreas Hemmerle,弗劳恩霍夫机床和成形技术研究所 IWU
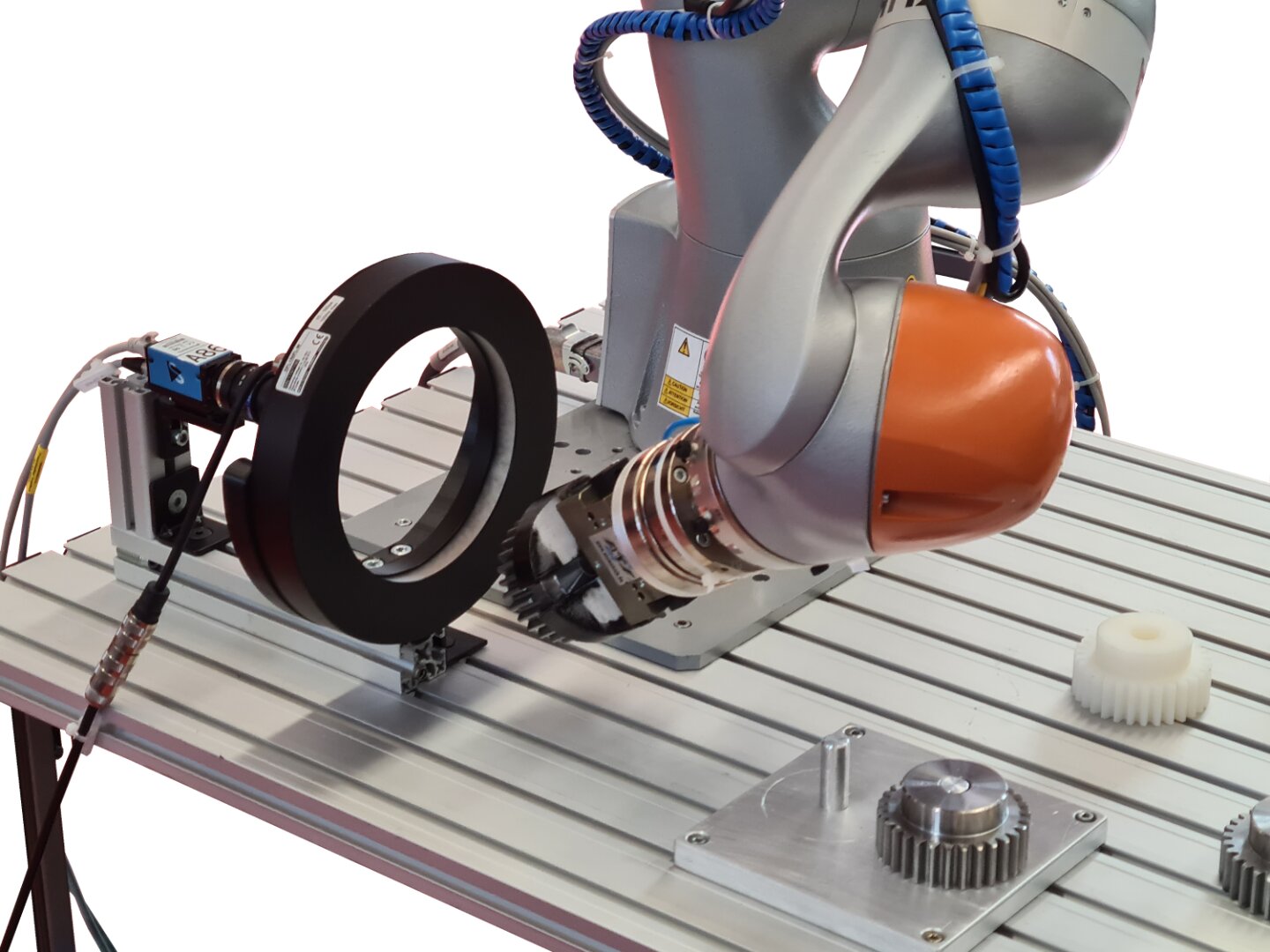
Xeidana 确认机器人已抓住正确的装备。 图片来源:弗劳恩霍夫机床和成形技术研究所 IWU
较小批量而非大规模生产、更复杂的生产线、日益增加的竞争压力、不稳定的供应链:在此背景下,法德研究项目 GreenBotAI 致力于解决机器人技术问题。
重点关注三个主要目标——即使在大流行时期也确保生产连续性,加强欧洲在生产自动化方面的独立性,以及显着降低欧洲工厂机器人应用的能源消耗。
从技术上讲,GreenBotAI 专注于工业机器人的反应和延迟时间、优化的路径规划以及在机器人运动时(“飞行中”)执行明确定义的任务。 例如,无需停止,就可以捕获 2D 图像以进行对象识别,以完成所需的处理或组装任务。 在这个法德研究项目中,Fraunhofer IWU 领导了该联盟。
该项目的重点是采用灵活的方法来处理材料和工件。 人工智能算法应该赋予制造业更大的灵活性,并加速各个工业部门的生产。 目标是能够自发处理复杂任务的智能机器人。
所需的硬件组件、最先进的监控深度学习方法、数据处理和错误控制的改进,预计将预示着机器人技术的代际转变。
GreenBotAI 正在研究多种手段,以减少高达 25% 的能源消耗。 其中包括数据缩减的人工智能模型、加速的抓取任务和降低的计算能力。
在 汉诺威贸易展览会,于 2024 年 4 月 22 日至 26 日举行,项目合作伙伴将展示他们迄今为止所取得的成就。 使用工业相机技术(“单次演示”)拍摄的单个部件的 2D 图像和少量的计算能力足以让机器人根据需要拾取、检查和定位该部件。
Fraunhofer IWU 开发的软件 Xeidana 可验证机器人是否拾取了正确的组件。 展位上的客人可以亲自尝试:他们将齿轮放置在协作机器人(专为与人协作而设计的机器人)工作区的桌子上的任意位置。
根据图像信息,软件确定所有物体相对于机器人的位置,计算机器人的路径,并确定抓取位置。 然后机器人拾起齿轮并完全依靠图像信息进行检查。
这就是力数据实时评估发挥作用的地方,指导机器人如何使用模仿人类触摸的人工智能智能应用将拾取的齿轮安装到第二齿轮中。 数字孪生还可以可视化机器人的所有实际动作。
参观者还可以现场体验装配和集成质量控制应用。
由弗劳恩霍夫机床和成型技术研究所提供 IWU
引文:使机器人更加灵活,并将其能源消耗减少高达 25%(2024 年,4 月 9 日),2024 年 4 月 15 日检索自
本文件受版权保护。 除出于私人学习或研究目的的公平交易外,未经书面许可不得复制任何部分。 内容仅供参考。
1713218019
#使机器人更加灵活并减少高达 #的能耗
2024-04-09 19:18:03




:quality(70):focal(2951x2673:2961x2683)/cloudfront-eu-central-1.images.arcpublishing.com/liberation/3IBKIRWH5VEXVM4ZELYL2RXBZM.jpg)